Why does a bike/bicycle fall when its speed is very low or close to zero and is balanced when going with a high speed?
Asked
Active
Viewed 2.1k times
10 Answers
27
We have a series of papers on exactly the topic of this discussion, but a bit more narrowly defined. That is, how and why can a bicycle balance itself?
In short, how does a moving bicycle balance itself? For a variety of complicated reasons it steers in the same direction as it falls. And, if you will excuse the sloppy informal physics language, because of the resulting curved path, thecentrifugal forces, push it back upright. What complicated reasons? Partially from the trail (or castor effects), partially from the angular momentum of the spinning wheels, and partially from other effects related to geometry and mass distribution. But there is no simple single necessary mechanism that we know of. For example, our paper in Science Magazine shows that a bicycle can be self-stable without any castor (no trail) and with no spin angular momentum of the front wheels.
We have written several papers and supporting documents. And we have in these a pretty exhaustive coverage of the literature. So if you want to know what we think, what others have thought, and what we think about what they thought, it's all there. I don't think you will know of some important reference that we have not reviewed and described. You can start with my web page http://ruina.tam.cornell.edu (or google ruina bicycle or google schwabb bicycle.
The website includes photos and videos including simple explanations of some of these things.
bdsl
- 640
andy ruina
- 381
24
The surprising answer is that the stability of the modern bicycle has little or nothing to do with centrifugal force or gyroscopes or any of that. Look up "bicycle stability" on Google. Experiments show that the sloped angle of the front fork is very important, e.g. If the fork pointed backwards it is very difficult to stay upright at any speed.
At higher speeds a very slight turn of the handles moves the bicycle under the center of gravity of the rider quicker, so that the dynamical stability is improved. As usual experiment corrects theory here.
See the answer of Tristan at Does leaning (banking) help cause turning on a bicycle? as well for an even better answer
See the comment of nibot below for a reference to an actual definitive article.
sigoldberg1
- 4,537
23
A report appeared in Science today which addresses this exact question: Kooijman et al., Science 332 (6027): 339-342, "A Bicycle Can Be Self-Stable Without Gyroscopic or Caster Effects."
The abstract reads:
A riderless bicycle can automatically steer itself so as to recover from falls. The common view is that this self-steering is caused by gyroscopic precession of the front wheel, or by the wheel contact trailing like a caster behind the steer axis. We show that neither effect is necessary for self-stability. Using linearized stability calculations as a guide, we built a bicycle with extra counter-rotating wheels (canceling the wheel spin angular momentum) and with its front-wheel ground-contact forward of the steer axis (making the trailing distance negative). When laterally disturbed from rolling straight, this bicycle automatically recovers to upright travel. Our results show that various design variables, like the front mass location and the steer axis tilt, contribute to stability in complex interacting ways.
There is also a blurb in ScienceNOW that you can read without subscription.
Here is a free-to-read preprint.
nibot
- 9,691
10
I am sorry, but the way this topic is treated in the discussion below is a complete and embarrassing mess. Some of the answers below are complete nonsense, and the by far most competent answer (by Andy Ruina) has one of the lower scores, with the highest-scoring answer being mostly incorrect.
First, the direct answer to the original question is the weakening effect of conservation-of-angular-momentum stabilization at decreasing speeds, and nothing more needs to be said as far as that question goes.
Second, the more general question of what stabilizes a bicycle is answered most thoroughly by the material on Andy Ruina's website (who admittedly was late with his post). Long story short, this is a non-trivial topic, but rigorous analysis is possible with some effort, and such analysis has been done, most importantly by Ruina's group at Cornell. Their stability analysis clearly shows the effect of a number of factors of the bicycle geometry. And, yes, of course, steering angle and rake plays a role, too, as well as other factors.
I note that Ruina even provides a piece of software (JBike6) people can use to perform such stability analyses themselves. Here is an example of its output:
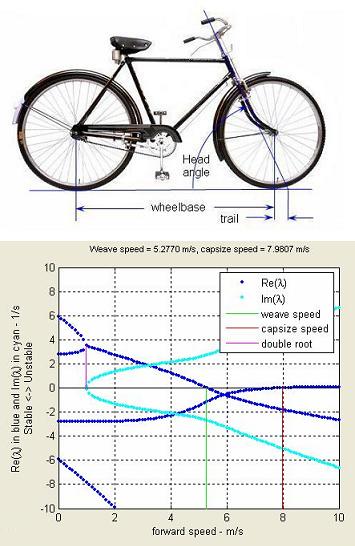
We can clearly see how one of the eigenvalues crosses into the unstable region as the bicycle speed is reduced. In this case the bike becomes unstable at a "weave speed" of about $5.3\,\mbox{m/s}$.
In general, different modes of instability are possible. As an example, additional modalities of instability can arise when there is a rider steering the bicycle. For example, certain road bikes experience high-speed instabilities (the so-called "high-speed wobble") as well, which are due to the interaction of the rider with the bicycle. In this case frame flexibility is an important factor. One of my road bikes did this at speeds above about $40\,\mbox{mph}$. Not fun...
Pirx
- 3,803
4
When you walk on stilts or skate, you don't balance by being very careful. You don't even balance. You're continually out of balance, and you keep moving your point of support so that you arrest your fall in one direction and start falling in another.
If you're on a bicycle moving very slowly, you do the same thing. You keep moving your point of support left or right to arrest your fall in that direction. If you're moving slowly, it takes more steering motion to accomplish this, so you "wiggle about". At higher speed, it takes less steering motion to do that. That works even in the absence of gyroscopic precession, caster, or rake angle. Just watch a scooter with tiny wheels, or a ski-bike, or a unicycle.
Now, throw in rake angle. Turning the handlebars to the right moves the point of support to the left, even if you're moving very slowly, so that helps.
Now, switch to a high-speed motorcycle with a nice, heavy, gyroscopic front wheel. When it's traveling at a good speed, that thing precesses, no matter what people say, and its precession goes in exactly the right way to powerfully maintain stability.
So it's not an all-or-nothing single-explanation deal.
Mike Dunlavey
- 17,328
2
Important parts to access in case of a link failure:
A bicycle remains upright even if the user removes his hands from the handlebars, effectively giving up his ability to steer. In fact, a bicycle doesn’t even need a rider at all: bicycles balance perfectly fine without anybody on them, provided they’re moving fast enough (somewhere between eight and 13 miles per hour — a relaxed speed).
A second explanation may come to mind, for those who have learned some high school physics: the spinning wheels keep the bicycle from falling.
Rotating objects, like the wheels of a bicycle, are stable and the faster they spin, the more stable they become. This gyroscopic effect, as physicists refer to it, explains why tops and yo-yos behave the way they do.
It does not, however, explain the bicycle’s stability. Bicycle wheels are fairly light and don’t generate enough inertia to overcome even a slight tilt. Additionally, while a bicycle can remain stable without a rider, that’s only when traveling forward. Push it backward at similar speeds and it quickly topples over. If the gyroscopic effect were a major contributing factor, this probably wouldn’t happen.
To make sure that this effect wasn’t necessary, a group working out of Cornell University built a bicycle with two additional wheels. These didn’t touch the ground; they merely spun in the opposite direction of the main bicycle wheels, eliminating any gyroscopic effects.
This non-gyroscopic bicycle, which more closely resembles a scooter, remained self-stable. What’s more, once the bicycle was in motion, the experimenters pushed it to the side in an attempt to knock it over. They couldn’t; the bike corrected itself.
Partially through this research, physicists have come up with an explanation for why bicycles don’t tip over: they always turn toward the direction they’re falling. When the bicycle begins to tilt to one side, the front wheel turns in that same direction, which prevents the bike from falling over. This can be verified by locking the handlebars so that the bicycle can’t turn. When you do this and give the bike a push, it topples over. OK, so this self-stability has to do with the way the bicycle turns in the direction it falls. But why does it do that?
That’s where things get really complicated. Rather than a simple explanation, scientists have developed a formula that determines whether or not a bicycle design will have this essential attribute. In so much as it has been tested, the formula works. Unfortunately, it’s not a simple two- or three-variable equation: it requires 25 different characteristics of the bicycle to make a prediction.
Wrichik Basu
- 2,910
0
The basic concept (at least, as I've heard it) is angular momentum. As a bike wheel turns, it has an amount of angular momentum proportional to its rotational speed, associated with the plane of rotation of the wheel. This makes it act basically like a gyroscope: it "resists" any change in the amount or direction of that angular momentum, in the same sense that mass "resists" any change in the amount or direction of its velocity. This basically slows down the tipping of the bike to the point where you are able to prevent it by pushing down on the opposite side pedal.
David Z
- 77,804
0
The answer is "Centrifugal force"
The biger your speed is the biger this force is too.
You can notice that when you steer left you make your bike's slope on left side. And Contrifugal force don't let you fall (when your steer angle is constant at the end bike will make a circle). Then when you make your bike steer more left your bike returns to the balance because you increase that force (it comes from equation).
When your speed is smaller contrifugal force is smaller and bike is harder to steer so you can fall easier.
oneat
- 1,229
0
oneat's answer is correct (I would have commented but I think I'm going to need more space)
Imagine a vector (line) starting at your center of gravity. The line represents all the forces acting on you. When you are standing still, the direction of the line is straight down (gravity is the single force present).
To not fall over whens standing still on a bike, you have to keep the point where the line intersects the ground (let's call it point A), between the two wheels of the bike. If you don't, you'll start tipping over.
When standing still, the only way to affect that point is to move your center of gravity which you do by shifting your weight.
Now let's say you're moving. If you're moving in a straight line, at a constant speed, everything is the same, the only force acting on you is gravity. But if you change direction, you get centrifugal force (as oneat correctly pointed out), the same as what you get when you make a sharp turn in a car moving at speed. The value of that force is proportional with your speed, your weight and the speed of the turn.
This centrifugal force is added to the gravity, and changes the direction of the resulting force acting on you.
Remember point A? If you're riding your bike and it starts to lean to the right, point A starts to move to the right and the bikes leans even more, and so on. But, you instinctively know to turn your bike to the right. This causes a centrifugal force, pointing left, to appear). If point A is still between your wheels then you're fine.
If you're moving slowly, the centrifugal force is small, so you have to take the turn more sharply to compensate. If you're moving fast, you might only need to nudge your bike a little to compensate.
It's explained in more detail here. (I actually thought of looking it up in wikipedia only after writing this answer, I don't have time to read the article now, hopefully I'm not too wrong)
Adrian Mester
- 117
-4
The answer is obvious by inspection. Unfortunately, researchers don't bother examining the object of study but create math models with assumptions that drive the result. Centrifugal force driven by the bicycle steering into alternating arcs is the most common assumption. Then there's the utter arrogance of physicists who won't study tire forces. It is an engineering problem and physics can't answer it. When a bicycle tips a lateral camber force is generated at both tires, pushing the bike into the fall. This sideways motion adds to the forward motion yielding a direction vector skewed to the tipping side. When a wheel's plane is out of alignment with the direction it is travelling, a slip angle is formed and a consequent force. The slip angle forces oppose the camber forces but at the front tire, the slip angle force steers the wheel into alignment, via the trail, with the direction vector. This allows the camber force to push the front end toward the fall while the rear wheel is pinched between the camber and slip angle force. These forces persist until the wheels are aligned with the direction of travel. As speed increases the slip angles become smaller and less important as the bike remains upright without steering and supported by camber alone.