This question has been bothering me for a while now. Everywhere I look, everyone talks about 'fictitious forces' and how they apparently explain the bike being in equilibrium. However, if we just look at a simple force diagram, we can see that turning moments around certain points are unbalanced: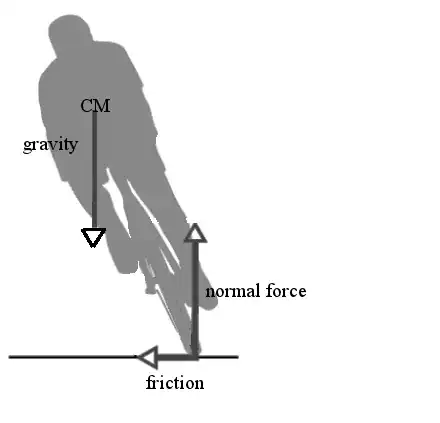
If we take moments around, for example, the point where the wheel touches the ground, we obtain that a resultant moment of $amg\cos \theta$, where $a$ is some length, $m$ the mass of the combined system of the driver and the bike, and $\theta$ the angle between the bike and the ground, is acting so as to make the system fall down in the direction of the centre.
This moment will always be 'towards the centre' - irrespective of the bike's position. That means it should fall down. So why doesn't it? Clearly, either there should be no resultant moment, or the resultant moment throughout the duration of one lap made by the bike should be $0$, but none is evidently the case here. What am I missing?