In the control volume for a fluid moving with velocities $u$, $v$, and $w$ in the $x$, $y$, and $z$ directions, respectively, we observe that the bottom face of the control volume is subjected to three types of stresses,a normal stress and two shear stresses, as shown in the following figure:

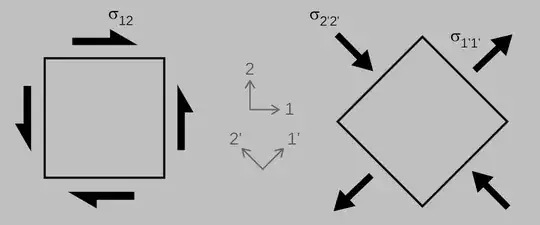
I will focus here on the shear stress, which is expressed by the following relation:
$$\tau_{zx} = \mu \left( \frac{\partial u}{\partial z} + \frac{\partial w}{\partial x} \right)$$
Before encountering this relation, I expected it to be as follows:
$$\tau_{zx} = \mu \left( \frac{\partial u}{\partial z} \right)$$
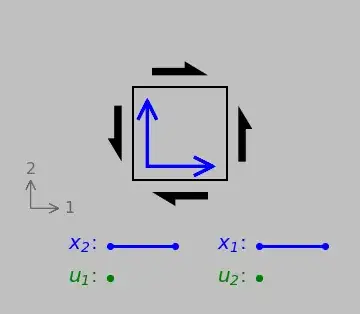
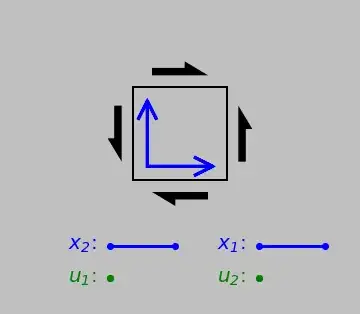
This is because I believe that the shear stress acting on the bottom face of the control volume arises due to the effect of friction between the parallel layers. Therefore, the velocity difference $u$ in the $z$-direction seemed acceptable to me as a cause of this friction. However, what raises my question is the presence of the derivative $ \frac{\partial w}{\partial x} $ in the relation, as I cannot visualize the effect of the velocity difference in the layers perpendicular to this face on the shear stress.
Can someone explain the reason for including this term $ \frac{\partial w}{\partial x} $ in the relation and its effect on the shear stress? I would like to get an explanation that helps me adjust my perspective and understand this point better.