Linear algebra (Osnabrück 2024-2025)/Part II/Lecture 49
- Symmetries

See Also



The most important evolutionary splitting in the animal kingdom (more precisely, among the eumetazoa) is related to the symmetry of the animals. There are the radial-symmetric animals like jellyfish, and the so-called bilateria. The first ones have only one structuring direction (front and back), along which the animal can develop different features. In the plane perpendicular to this axis, only the distance to the axis makes a difference, they can rotate around the axis. The bilateria have a second structuring direction, beside front and back they have up and down; this makes the development of more complex animals possible. The genetic encoding of the space structure, the basis of this complexification, was an important step in evolution. A consequence was the Cambrian explosion.
Let be a subset of a Euclidean vector space. A proper isometry


fulfilling
is called a proper symmetry or a motion of .

The set of all symmetries of a geometric object form a group, with the composition of mappings as binary operation. This group is called the (proper) symmetry group of . It is a subgroup of the group of all (proper) isometries of the Euclidean vector space. If is sufficiently complicated, then there are no isometries beside the identity. In the cases and , every isometry is a symmetry. The set of all symmetries allowing the improper isometries form also a group. The proper isometries are the symmetries that can be performed in the physical world; they are the mappings that preserve the orientation. As an introductory example, we discuss the symmetries of a cube.


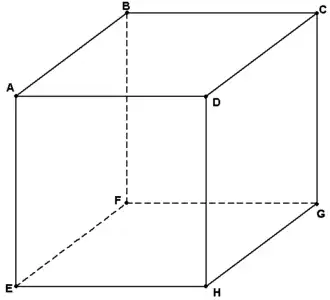
We consider a cube , with sides of length , and the origin as its center. Thus, the vertices are



We ask what are the possibilities to transform the cube into itself. By this, we mean that the cube shall not be deformed in any way, the cube is considered rigid, and the motion should be realizable in the physical world. We talk about a (proper) motion of the cube. During such a motion, the center of the cube does not change its position, and faces are mapped to faces, edges to edges, vertices to vertices. Also, the centers of the faces are mapped to centers of faces, and opposite centers of faces are mapped to opposite centers of faces. The centers of faces are the six points

If the point is mapped to the face center , then is mapped to the opposite point, that is, . Every face center is allowed, but this does not determine the motion. For the face center , there are four possible image points (only and are excluded), because the cube can be rotated around the axis given by by a multiple of degree. These rotations correspond to the possibilities to move the point to one of the four remaining face centers. The choice of the second face center determines the motion uniquely. How clear is that?






To understand this, the following observations are useful.
- Motions can be performed after another, that is, if we have two motions of the cube \varphi , then the composition is defined, which performs first and then .
- The identical motion, which moves nothing, is a motion. If man zu of a arbitraryen Bewegung the identische Bewegung davor or danach durchführt, so ändert the the Bewegung not.
- For a motion , there exists the opposite motion (or "inverse motion“) , which has the property that the compositions and are just the identity.







With these observation, we can understand the principle mentioned above: assume that there are two motions and , both sending to and to . Let denote the inverse motion of . Then we consider the composed motion


This motion hat the property that is mapped to and that is mapped to , as sends to , and sends back to (and accordingly for ). This means that has the property that as well as are sent to themselves, that is, these points are fixed points of the motion. But this implies that the -plane is fixed. The only physical motion of the cube that fixes this plane is the identical motion. Therefore, , and . Note that the reflection an the -plane swaps the points and , but this is a so-called improper motion; it can not be performed in the physical world.







This implies that, for the basis vector , there are six possible image vectors, for the second basis vector , there are four possibilities, and that these choices determine the mapping uniquely. All together, there are transformations of the cube. These motions may be described by a -matrix, where the columns describe the image vectors of the basis vectors. If the first basis vector is fixed, then the four possible motions are given by the matrices



This can be seen as follows: if a center of a face is mapped to itself, then this also holds for opposite center; therefore, also the corresponding axis is fixed. A motion that fixes such an axis through the center of faces is a rotation around this axis, by a multiple of degree. Such a motion is a motion in the plane (namely, of the plane perpendicular to this axis), and this observation yields the given matrices.
An important property of this motion is that it is a rotation of the space around a fixed axis. This property holds in general for space motions due to Theorem 34.8 . Since the rotations just mentioned are multiples of a quarter rotation, we get the identity if we perform this rotation four times in a row. In the case of a half rotation, already the second execution gives the identity. The order, in the sense the group theory, of such a motion is or .

We consider now in the example of a cube the space diagonal that runs through and durch . We can also rotate the cube around this axis, by a multiple of degree. Have a look on the cube so that a vertex is in the center of the view. The rotation sending to , sends to . Hence, these two rotations around the space diagonal have the matrix representation





(and they are inverse to each other). A further possible rotation is a half rotation around the axis through the center of the edges, that is, an axis given by the centers of two opposite edges.
A strategy to understand the motions of a cube is to understand what happens to the centers of the faces under a motion, which of these six points are fixed, which are moved to which point. A motion defines always a bijection of this point set to itself, that is, a permutation. However, there are further characteristic points, and, more generally geometric subobjects of the cube, that are transformed under a motion of the cube to itself, like set of vertices, the set of the centers of the edges, the set of edges, the set of faces, the set of all space diagonals, etc. Every motion acts on these objects in a characteristic way. In mathematical terms, the precise concept of this observation is the concept of a group action and of a group homomorphism. If we use the notions for the vertices from the picture above, then the quarter rotation and the rotation by degree mentioned above induce the following action on the vertices.
Quarter rotation around the axis through face centers.
| Point | ||||||||
| Image point |







Rotation by degree around the space diagonal.
| Point | ||||||||
| Image point |
If the rotation axis of a space motion is known, then the motion is characterized by what happens on the plane perpendicular to the axis. Therefore, it is first important to understand motions in the plane that fix a point.
We consider the unit circle

The circle can be parametrized by the trigonometric functions. These assign, for an angle (with respect to the -axis, counter-clockwise), the corresponding point



on the circle. A uniform subdivision of the interval in pieces of the same length, given by the boundaries
![{\displaystyle {}[0,2\pi ]}](../../dc77c7de46a038b0891383777f148b4139e49be7.svg)


yields a uniform subdivision of the circle with the points

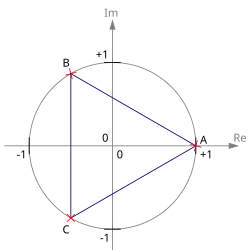
These points are the vertices of a regular -gon. The regelular "2-gon“ has the vertices (1,0) , the regular (equilateral) trianlge has the vertices

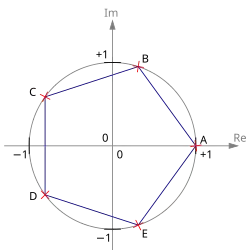
the regular -gon (square) has the vertices

We consider a regular -gon as a rigid object, and we are interested how it can be transformed to itself. The origin is the center (of gravity) of the -gon, a motion of the -gon maps this center to itself. Because such a motion does not change the length, the point is sent to a vertex; only these points have distance one from the origin. A motion does not change angles; therefore, the adjacent vertex is sent to an adjacent vertex of the image point of . For a proper motion (realizable in the plane in the physical sense!), also the ordering (the "orientation“) of the vertices is preserved, so that the only proper motions of a regular -gon are the rotations by a multiple of .



If we also allow improper symmetries, then there are also the reflections at an axis; for even, the reflection axes run through two opposite vertices, or two opposite edge centers, and bei odd, the reflection axes run through a vertex and an opposite edge center.
Let be fixed, and set , and let denote the rotation of the -gon around counter-clockwise. Then every rotation of the -gon can be written as , with a uniquely determined between and . Here, is the rotation by zero degree (the identical motion). If is performed -times, then we have done one complete rotation. Looking at the result, this is just the identical motion. More generally, when is performed -times, then the result (that is, the effective motion) does only depend on the remainder . The inverse motion of is , that is, -times the motion backwards, but this is the same as . All rotations of a regular -gon form a cyclic group of order .











| << | Linear algebra (Osnabrück 2024-2025)/Part II | >> PDF-version of this lecture Exercise sheet for this lecture (PDF) |
|---|