You are asking about the velocity kinematics. The 2D projection of the 3D equation $$\vec{v}_B = \vec{v}_A + \omega \times ( \vec{r}_B - \vec{r}_A )$$ is
$$ \pmatrix{ vx_B \\ vy_B } = \pmatrix{vx_A \\ vy_A} + \begin{bmatrix} 0 & -\omega \\ \omega & 0 \end{bmatrix} \pmatrix{x_B-x_A \\ y_B-y_A} $$
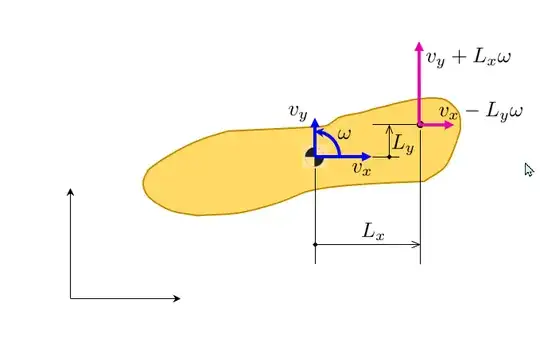
So for your nomenclature and variables the velocity $(vx_P,vy_P)$ at the point P as is relates to the velocity $(vx_C,vy_C)$ at the center of mass is
$$ \pmatrix{ vx_P \\ vy_P } = \pmatrix{ vx_C - L_y \omega \\ vy_C + L_x \omega} $$
The geometric interpretation is take the velocity at the center as it is, and add the rotational component (light blue below) which is perpendicular to the distance vector
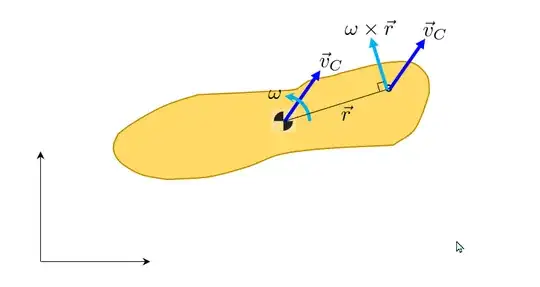
$$\vec{v}_P = \vec{v}_C + \omega \times \vec{r} $$
Of course, the question now is how do you take the cross product of a scalar value like $\omega$.
The answer comes from considering the full 3D vectors and proceed with the cross-product as if the rotation are all out of plane vectors.
$$ \pmatrix{ vx_P \\ vy_P \\ 0} = \pmatrix{ vx_C \\ vy_C \\ 0} + \pmatrix{0 \\ 0 \\ \omega} \times \pmatrix{r_x \\ r_y \\ 0} = \pmatrix{ vx_C - r_y \, \omega \\ vy_C + r_x\, \omega \\ 0} $$
Interestingly, you can find the position $(r_x,r_y)$ that represents the instant center of rotation (which has $\vec{v}_P = 0$) from the equation above
$$ \pmatrix{r_x \\ r_y } = \pmatrix{ \frac{ \mbox{-}vy_C}{\omega} \\ \frac{vx_C}{\omega} }$$
Note that the 3D version of the above is
$$ \vec{r}_{\rm rot} = \frac{ \vec{\omega} \times \vec{v}_C } { \| \vec{\omega} \|^2} $$

