If the net force is zero, then torque as summed about any arbitrary point is going to be invariant (the same all over). See the transformation of the summation point from the center of mass C to some arbitrary point A below:
$$ \require{cancel} \boldsymbol{\tau}_A = \boldsymbol{\tau}_C + \cancel{ \boldsymbol{r}_{A/C} \times \boldsymbol{F}} $$
But I think you are asking about the coupled terms when expressing the equations of motion not at the center of mass. In this case, yes there is a component of torque that relates to the translation of the center of mass.
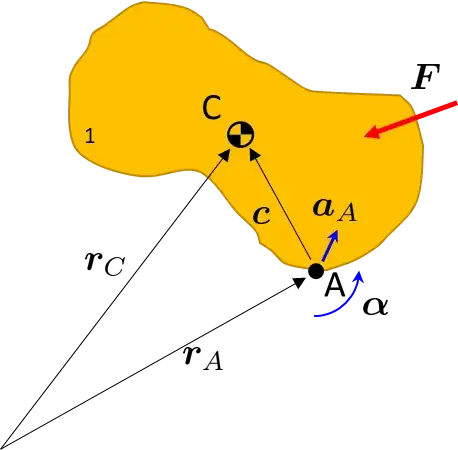
Take the equation of translation $\boldsymbol{F} = m \boldsymbol{a}_C$ and transform it to the arbitrary point. Consider the relative position vector of the center of mass $\boldsymbol{c} = \boldsymbol{r}_C - \boldsymbol{r}_A$ and form Newton's second law
$$ \boldsymbol{F} = m \left(\boldsymbol{a}_{A}-\boldsymbol{c}\times\boldsymbol{\alpha}+\boldsymbol{\omega}\times\left(\boldsymbol{\omega}\times\boldsymbol{c}\right) \right) \tag{1}$$
we will consider the special cases where forces are zero later. Now take the equation of rotation (Eule'r law) and consider the torque at A $\boldsymbol{\tau}_A = \boldsymbol{\tau}_C + \boldsymbol{c} \times \boldsymbol{F}$
$$ \boldsymbol{\tau}_A = {\bf I}_C \boldsymbol{\alpha} + \boldsymbol{\omega} \times {\bf I}_C \boldsymbol{\omega} + \boldsymbol{c} \times \boldsymbol{F} \tag{2}$$
So in general $\boldsymbol{\tau}_A$ has terms that depend on $\boldsymbol{a}_A$ when (1) is used in (2).
But if you know the net force $\boldsymbol{F}$ is zero, then the $\boldsymbol{c}\times \boldsymbol{F}$ term vanishes and you no longer have this cross dependency. This is in line with my first statement where $\boldsymbol{\tau}_A = \boldsymbol{\tau}_C$ with no net torque.
The reason we use the center of mass is exactly because it decouples the equations of motion
| Equations |
At Center of Mass ($\boldsymbol{a}_C$, $\boldsymbol{\alpha}$, $\boldsymbol{F}$, $\boldsymbol{\tau}_C$) |
At Arbitrary Point ($\boldsymbol{a}_A$, $\boldsymbol{\alpha}$, $\boldsymbol{F}$, $\boldsymbol{\tau}_A$) |
| Translation |
$\boldsymbol{F} = m \boldsymbol{a}_C$ |
$\boldsymbol{F} = m \left( \boldsymbol{a}_{A}-\boldsymbol{c}\times\boldsymbol{\alpha}+\boldsymbol{\omega}\times\left(\boldsymbol{\omega}\times\boldsymbol{c}\right) \right) $ |
| Rotation |
$\boldsymbol{\tau}_C = {\bf I}_C \boldsymbol{\alpha} + \boldsymbol{\omega} \times {\bf I}_C \boldsymbol{\omega}$ |
$\boldsymbol{\tau}_A = {\bf I}_C \boldsymbol{\alpha} + \boldsymbol{\omega} \times {\bf I}_C \boldsymbol{\omega} + \boldsymbol{c} \times \boldsymbol{F} $ |
The above is often expressed with linear algebra, using large 6×1 vectors that combine translational and rotational components into one. This is enabled by using the matrix form of the cross product
For example $ \boldsymbol{c} \times \boldsymbol{F} $ can be expressed as a matrix product as
$$ [\boldsymbol{c} \times] \boldsymbol{F} = \begin{bmatrix} 0 & -c_z & c_y \\ c_z & 0 & - c_x \\ -c_y & c_x & 0 \end{bmatrix} \begin{pmatrix} F_x \\ F_y \\ F_z \end{pmatrix}$$
where $[\boldsymbol{c} \times]$ is defined as the 3×3 skew-symmetric matrix derived from $\boldsymbol{c}$.
The above equations in matrix form and some re-arranging are
$$ \small \begin{Bmatrix}\boldsymbol{F}\\
\boldsymbol{\tau}_{A}
\end{Bmatrix}=\begin{bmatrix}m[1] & -m[\boldsymbol{c}\times]\\
m[\boldsymbol{c}\times] & {\bf I}_{C}-m[\boldsymbol{c}\times][\boldsymbol{c}\times]
\end{bmatrix}\begin{Bmatrix}\boldsymbol{a}_{A}\\
\boldsymbol{\alpha}
\end{Bmatrix}+\begin{bmatrix}[1] & [0]\\{}
[\boldsymbol{c}\times] & [1]
\end{bmatrix}\begin{Bmatrix}\boldsymbol{\omega}\times m\left(\boldsymbol{\omega}\times\boldsymbol{c}\right)\\
\boldsymbol{\omega}\times{\bf I}_{C}\boldsymbol{\omega}
\end{Bmatrix} \tag{3} $$
where $[0]$ is the zero 3×3 matrix, $[1]$ the identity matrix, and $[\boldsymbol{c}\times]$ as shown above. Also note that ${\bf I}_{A} = {\bf I}_{C}-m[\boldsymbol{c}\times][\boldsymbol{c}\times]$ is the parallel axis theorem in 3D vector form.
You might be interested in the inverse of the above, where you know the forces/torques and want to find out the motion of the arbitrary point
$$ \small \begin{Bmatrix}\boldsymbol{a}_{A}\\
\boldsymbol{\alpha}
\end{Bmatrix}=\begin{bmatrix}\tfrac{1}{m}-[\boldsymbol{c}\times]{\bf I}_{C}^{-1}[\boldsymbol{c}\times] & [\boldsymbol{c}\times]{\bf I}_{C}^{-1}\\
-{\bf I}_{C}^{-1}[\boldsymbol{c}\times] & {\bf I}_{C}^{-1}
\end{bmatrix}\left(\begin{Bmatrix}\boldsymbol{F}\\
\boldsymbol{\tau}_{A}
\end{Bmatrix}-\begin{bmatrix}[1] & [0]\\{}
[\boldsymbol{c}\times] & [1]
\end{bmatrix}\begin{Bmatrix}\boldsymbol{\omega}\times m\left(\boldsymbol{\omega}\times\boldsymbol{c}\right)\\
\boldsymbol{\omega}\times{\bf I}_{C}\boldsymbol{\omega}
\end{Bmatrix}\right) \tag{4} $$
From the above you can see that $[\boldsymbol{c}\times]{\bf I}_{C}^{-1}$ is the term relating torque at A $\boldsymbol{\tau}_A$ to acceleration at A $\boldsymbol{a}_A$.
