First some general remarks, then I will discuss the L4/L5 point motion specifically.
I will refer to the three bodies of the three body system as ' the primary', 'the secondary', and 'the tertiary'.
We have that in order for the L4/L5 orbiting motion to persist the mass ratio between the primary and the secondary must be 24.96 or higher.
When the mass ratio is smaller than that 24.96 then eventually the tertiary ends up receiving a gravitational assist that ejects the tertiary from the system.
(Some years ago I created a L4/L5 Lagrange point simulation. The simulation corroborated the predicted behaviour: mass ratio larger than 25: tertiary remains in the system. Mass ratio smaller than 24, tertiary ends up being ejected. I very much enjoyed watching the scenarios play out.)
From here on everything I discuss is for the case of a suffiently large mass ratio, so that the L4/L5 orbiting motion persists.
It is essential to be aware that the motion of the tertiary is never an exactly repeating orbit. The motion of the tertiary has the same type of chaotic character as the general three body problem.
I recommend thinking about L4/L5 orbiting motion in terms of: there is no escape. It's not that the motion is stable: but there is no escape.
Now to the explanation of the L4/L5 Lagrange point motion specifically.
As we know there are two attraction regimes that give rise to closed orbits:
- inverse square law of attraction
- attraction according to Hooke's law
As we know: with an inverse square law the orbiting motion is along an ellipse, with the point of attraction at one focus.
The fact that with an inverse square law of attraction the orbiting motion is an exactly repeating orbit is an essential feature.
To illustrate that I discuss a thought demonstration.
Let a spacecraft be in orbit around a celestial body, let's make that the Earth. Let the initial orbit be a circular orbit, Low Earth Orbit, it takes the spacecraft about 90 minutes to complete a cycle.
Next the spacecraft fires its rocket engines for a number of seconds, increasing the velocity of the spacecraft.
The effect of that is that the circular orbit gets changed into an ellipse-shaped orbit, with its perigee at the point where the burn was executed. The resulting motion is cycling with perigee always at the same spot.
What I mean with 'the same spot' is that the orientation of the ellipse shaped orbit with respect to the fixed stars remains the same. (Of course in the actual solar system there are all kinds of perturbations; for the purpose of the thought demonstration those are ignored.)
The point is: there is a strong element of inescapable to orbiting motion.
If you are in a spacecraft, and you do a small burn, then the nature of the orbiting motion is that after a full cycle the orbiting motion brings you back to the point in the previous orbit where you started from.
That the-cycle-brings-you-back property is a general property of orbiting motion.
I cannot emphasize this enough:
When you are in orbit and there is a transient push on you then after a full orbit cycle the orbital dynamics brings you back to the point that you were pushed away from.
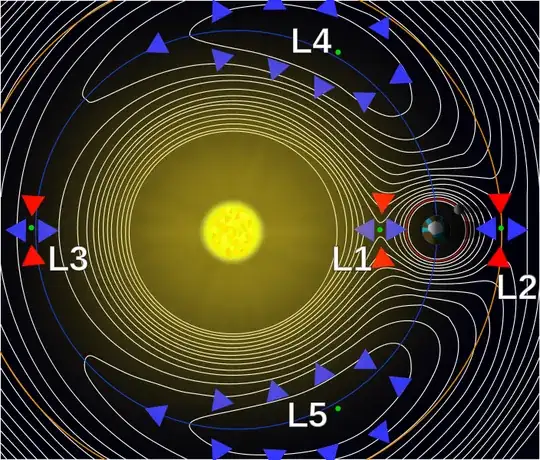
Imagine a tertiary that is initially orbiting very close to the L4 (L4 is 60 degrees ahead of the secondary)
The combination of the gravitational attractions from the primary and the secondary is such that it is energetically favorable for the tertiary to either start lagging L4, or to start pulling ahead of L4.
Once the tertiary starts lagging behind L4 the distance to the primary increases, and the distance to the secondary decreases. That means that once the tertiary start lagging behind L4 the lag tends to increase.
It isn't possible for the tertiary to remain in exact co-moving motion with the L4 point. For the tertiary to orbit exactly at the L4 point is similar to the case of a marble sitting on top of a dome. It is inevitable that the marble starts rolling down the dome. Likewise, for a tertiary that initially is co-moving with L4: inevitably the tertiary will start lagging behind the L4 point, or start pulling ahead of the L4 point.
But: we are dealing with orbiting motion here.
The tertiary is initially orbiting at the L4 point, and it gets pushed away from the L4 point, and then the orbital mechanics brings the tertiary back to where it came from.
(The description above was for the L4 point, the reasoning generalizes to the L5 point)
The same occurs when the tertiary is pushed away from the L4/L5 point in radial direction. Each time such a push happens the dynamics of orbiting motion brings the tertiary back to where it came from.
That is what I mean when I describe the L4/L5 orbital motion as 'it's not stable, but there is no escape'.
When the mass ratio between primary and secondary is sufficiently large the push away from the L4/L5 point is weak, and the orbital dynamics effect can undo it; the tertiary is returned to the L4/L5 point.
When the mass ratio between the primary and the secondary is small then the push away from the L4/L5 point is more than the orbital dynamics effect can counter.
With small primary/secondary mass ratio: when a simulation is started (starting with the tertiary at the L4/L5 point): once the tertiary rolls of the L4/L5 point it starts straying further and further away from it. The end result is ejection from the system.
Simpler case: circumnavigating motion with Hooke's law
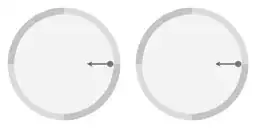
Picture 1. Animation
In the animation:
The disk with 4 quadrants along the rim represents a platform, any platform. The dark dot represents an object that is circumnavigating a point of attraction. The arrow represents the magnitude and direction of the force that is being exerted.
The left hand side of the animation shows the actual motion of the object. The right hand side of the animtion shows the motion of the object relative to a coordinate system that is rotating with the same period as the circumnavigating motion of the object.
While the circumnavigating object doesn't have a constant angular velocity it does have a regular orbital cycle; the angular velocity of the rotating coordinate system (right hand side) matches the duration of that cycle.
We have in the case of one-dimensional motion: Hooke's law gives harmonic oscillation.
The motion displayed on the left hand side of the animation is two-dimensional motion, and it can be described as a superposition of two harmonic oscillations, at right angles to each other:
$$ x = a \cos(\Omega t) \quad \text{and} \quad y = b \sin(\Omega t),$$
where
$a$ is half the length of the major axis
$b$ is half the length of the minor axis
$\Omega$ is $360^\circ$ divided by the duration of one revolution.
The following diagram illustrates the major axis and the minor axis:
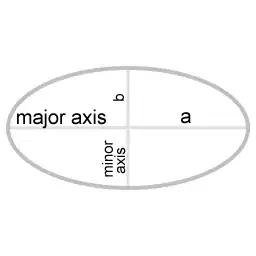
Picture 2. Diagram
The description above can be rearranged as follows:
$$ x = \left( \tfrac{a+b}{2} \right) \cos(\Omega t) + \left( \tfrac{a-b}{2} \right) \cos(\Omega t) $$
$$ y = \left( \tfrac{a+b}{2} \right) \sin(\Omega t) - \left( \tfrac{a-b}{2} \right) \sin(\Omega t) $$
The following animation illustrates the rearrangement:
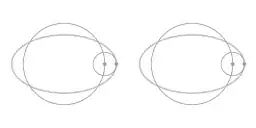
Picture 3. Animation
Repeating the animation with the quadrants:
The motion with respect to the rotating coordinate system (right hand side):
$$\begin{align}
x &= \left( \tfrac{a-b}{2} \right) \cos(2 \Omega t) \\
y &= - \left( \tfrac{a-b}{2} \right) \sin(2 \Omega t)
\end{align}$$
Notice especially that when the central attracting force is according to Hooke's law the motion relative to the rotating coordinate system (right hand side) cycles twice for every cycle of the circumnavigating motion (left hand side)
The next step is to obtain an expression for the acceleration of the moving object relative to the co-rotating coordinate system.
Let $a_c$ be the acceleration relative to the co-rotating coordinate system.
We take advantage of the fact that the motion along the epi-circle is, in the idealized case, perfectly circular motion.
In the case of circular motion, the acceleration is perpendicular to the velocity and has this magnitude:
$$ a_c = \omega^2r \tag{1} \label{eq:1}$$
(I use the lowercase $\omega$ here for the motion along the epi-circle to distinguish it from the uppercase $\Omega$ that I used for the angular velocity of the system.)
As stated earlier, the motion along the epi-circle occurs at twice the frequency of the angular velocity of the system: $\omega = 2\Omega$.
Inserting that into \eqref{eq:1}:
$$ a_c = (2\Omega)^2r \tag{2}\label{eq:2} $$
Let $v_c$ be the velocity of the object relative to the co-rotating coordinate system. We have the general relation $v=\omega r$. We have, in this case, $\omega=2\Omega$. Combining that gives for this case the expression $ 2\Omega r = v_c$, that we can use to modify \eqref{eq:2}.
After substituting, we obtain the following expression for the acceleration of the object with respect to the co-rotating coordinate system:
$$ a_c = 2\Omega v_c \tag{3}\label{eq:3} $$
I'm bringing all of this up because there is a common theme: closed orbit.
Both with an inverse square law (of attraction) and with Hooke's law the resulting motion is a closed loop.
In the case of Hooke's law (3) gives the acceleration with respect to the rotating coordinate system. That is: for the motion with respect to the rotating coordinate system (3) gives the acceleration factor that is associated with the object being returned to where it came from.
(3) describes that in the case of circumnavigating motion subject to a central force there is a relation between velocity with respect to the rotating coordinate system and acceleration with respect to the rotating coordinate system.
[Later edit]
The image below is for the case of a primary and a secondary, with the secondary orbiting with a slightly eccentric orbit. The motion shown is the motion with respect to the rotating coordinate system that is rotating with the same period as the secondary.
The image is a screenshot from the orbital motion simulation that I mentioned earlier in this answer.
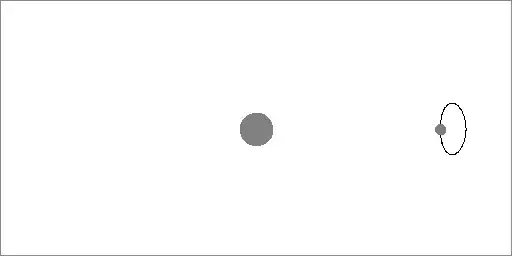
The motion with respect to the rotating coordinate system is not along a circle; the shape is elongated.
(It is only in the case of a central force according to Hooke's law that the motion wrt the rotating coordinate system is along a (small) circle.)
The image below is again a screenshot of the simulation. It displayes motion of the tertiary with respect to the Lagrange point.
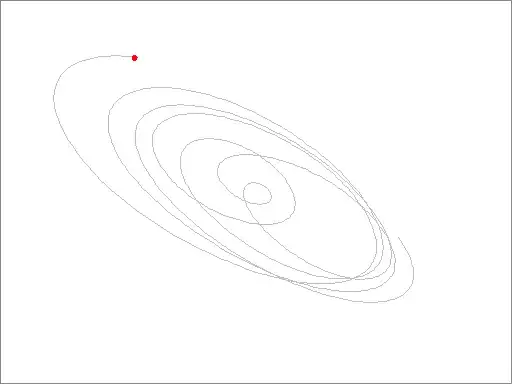
We have that the motion of an actual tertiary around the Lagrange point has a chaotic property; the motion is constrained to a region, but within that region long term prediction is not possible. The path that the simulation yields has that chaotic property.
Why L4/L5 motion persists
The thing that is unique to the L4/L5 points is that there is a symmetry: the gravitational influences from the primary and the secondary combine in such a way that the tertiary is pulled away from the L4/L5 point in either direction. Combined with that: the orbital dynamics always brings the tertiary back to the L4/L5 point. No escape.
For any other point in the primary/secondary system, including the L1, L2, and L3 points, that symmetry is not there. That allows drift to accumulate.
The accumulation issue is the key:
For any point in the primary/secondary system: drift of a tertiary can accumulate. The L4/L5 regions are the only regions where symmetry of the force effects prevents drift from accumulating.






{kind=link}