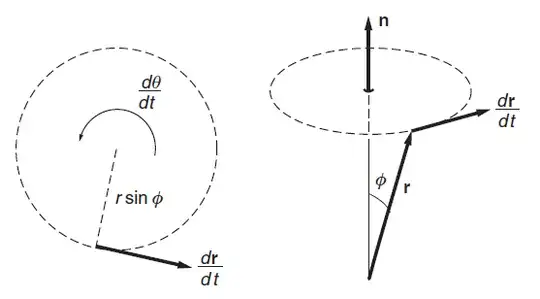
I'm reading the Wikipedia page on angular velocity. It says here of the angular velocity vector in three dimensions that “[t]he magnitude is the angular speed, and the direction describes the axis of rotation”. There, the angular velocity vector $\vec \omega$ is defined as $\boldsymbol\omega = \frac{d\phi}{dt}\mathbf{u}$ which may be written as $$ \boldsymbol\omega=\frac{|\mathbf{v}|\sin \theta}{|\mathbf{r}|} \mathbf{u} $$ which, by the definition of the cross product, can be re-written as
$$ \boldsymbol{\omega} = \frac{\mathbf{r} \times \mathbf{v}}{|\mathbf{r}|^2} ~. \label{a}\tag{1} $$
Here $\mathbf{r}$ is vector from the origin to the particle position, $\mathbf{v}$ is the velocity, $\hat{\mathbf{u}}$ is the axis of rotation, and $\theta$ is the polar and $\phi$ is the azimuthal angle.
I imagine a particle spinning in a circle of unit radius about the $z$-axis (so rotation is parallel to the $xy$-plane). Suppose the particle has a non-zero $z$-coordinate, say $\mathbf{r}_z = 3 \, \hat{\mathbf{e}}_z$. Then it's clear that the formula ($\ref{a}$) will not give a vector parallel to the $z$-axis, despite the fact that this is the axis of rotation. So is the formula wrong?
Also, it occurred to me that it might be more natural to define the angular velocity vector to be parallel to the binormal of the path. I would think this would give the axis about which the particle is instantaneously rotating. Does any definition like this exist?
Finally, how would we define angular acceleration here? Is it really this? $$\alpha = \frac{d\omega}{dt}$$ With $\omega$ defined as above, that becomes quite a complicated expression which I'm not sure how to interpret.