In this answer the catenary problem is solved with differential calculus.
The fact that the catenary problem can be solved both with differential calculus and with variational calculus is very, very significant. It is an instance of a general property of application of calculus of variations in physics.
Differential calculus and variational calculus are closely related.
Note that the Euler-Lagrange equation is a differential equation. There is a reason that the Euler-Lagrange equation is a differential equation.
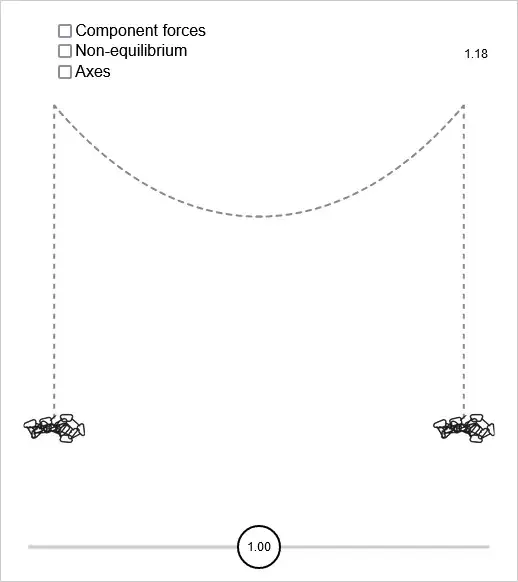
The image shows a hanging chain in a state of force equilibrium.
The image is stylized, the idea is that at the cusps the chain can move freely. Imagine there are frictionless rollers at the cusps.
The length of the vertical sections is set up to provide the amount of tension force that is required for force equilibrium with the length of chain hanging between the cusps.
(The image is a screenshot of an interactive diagram that is on my own website.)
First:
To set up the differential equation for the shape of the catenary.
Since the shape is symmetric it is sufficient to evaluate from the midpoint to the cusp.
The catenary is in force equilibrium at every point along its length.
In particular: there is no bending force anywhere along the length. (If there would be a bending force then the string would move in that direction, but the string isn't moving.) It follows: at every point along the length of the string the local tension force is tangent to the local slope.
With:
$T_H$ The horizontal component of the tension
$λ$ The weight per unit of length
$L$ the length of the chain from the midpoint to the x-coordinate.
The weight that has to be supported at coordinate $x$ is given by multiplying the length $L$ with the weight per unit of length: $λL$
The differential equation setup here uses the following property: gravity is acting in the vertical direction, therefore there is no gradient in the horizontal component of the tension. That is: the horizontal component of the tension is not a function of the x-coordinate, but constant.
In preparation: from midpoint to cusp the slope of the curve increases; the length of chain per unit of x-coordinate increases accordingly. (1) gives an expression for dL/dx, which will later be used.
$$ (dL)^2=(dx)^2+(dy)^2 \quad \Leftrightarrow \quad \frac{dL}{dx} = \sqrt{1 + \left(\frac{dy}{dx}\right)^2} \tag{1} $$
At every point along the catenary the slope of the curve is equal to the ratio of horizontal tension component and vertical tension component:
$$ \frac{dy}{dx} = \frac{\lambda L}{T_H} \tag{2} $$
We need an expression with the derivative of $L$ with respect to $x$, so that (1) can be put to use. $T_H$ and $λ$ are constants, so we can treat $λ$/$T_H$ as a constant multiplication factor.
$$ \frac{dy}{dx} = L \frac{\lambda}{T_H} \tag{3} $$
Taking the derivative:
$$ \frac{d^2y}{dx^2} = \frac{\lambda}{T_H} \frac{dL}{dx} \tag{4} $$
Combining (4) and (1) allows us to eliminate the quantity $dL$, arriving at a differential equation that is is purely in terms of the cartesian coordinates $x$ and $y$:
$$ \frac{T_H}{\lambda}\frac{d^2y}{dx^2} = \sqrt{1 + \left(\frac{dy}{dx}\right)^2} \tag{5} $$
To simplify the quantity $T_H/\lambda$ is set so a value of 1, so that it can be omitted. (We have the option of putting it back later.)
$$ \frac{d^2y}{dx^2} = \sqrt{1 + \left(\frac{dy}{dx}\right)^2} \tag{6} $$
At this point we have with (6) reached an equation that is very similar to equation (6) of my earlier answer to this question, in which the problem was solved with calculus of variations.
We make the substitution $\tfrac{dy}{dx}=u$, and we square both sides. Squaring both sides introduces an extraneous solution, so at a later stage we must discard that.
$$ \left(\frac{du}{dx}\right)^2 = 1 + u^2 \tag{7} $$
Differentiating with respect to $x$ allows the expression to be simplified:
$$ 2\frac{du}{dx}\frac{d^2u}{dx^2} = 2u\frac{du}{dx} \tag{8} $$
After dividing by $2\tfrac{du}{dx}$:
$$ \frac{d^2u}{dx^2} = u \tag{9} $$
So the solution to the equation is a function with the property that if you differentiate it twice you are back to the original function. That narrows the options down to the hyperbolic sine and the hyperbolic cosine. Checking against the original equation rules out the hyperbolic sine.
(10) incorporates the ratio $\tfrac{T_H}{λ}$ such that it satisfies (5)
$$ y = \tfrac{T_H}{\lambda} \cosh \left(\tfrac{\lambda}{T_H} x \right) \tag{10} $$
Comparison with application of calculus of variations
There are striking parallels between the differential approach and the variational approach.
The differential approach capitalizes on the fact that the horizontal tension component is not a function of the x-coordinate.
In effect the variational approach capitalizes on the same property. Since the Lagrangian is not explicitly a function of the x-coordinate the Beltrami identity can be used.
The catenary problem is by nature a force equilibrium problem. The solution is a curve such that at every point along the curve the forces are in equilbrium.
The variational approach takes as input an expression for the total potential energy. As we know: potential energy is defined as the negative of work done: From an initial height $y_i$ to a final height $y_f$:
$$ E_p = - \int_{y_i}^{y_f} F \ dy \tag{11} $$
For the catenary problem it is sufficient to sweep out variation in one direction only: the direction of gravity. That is the vertical direction, the direction of the y-axis
Note especially:
The Euler-Lagrange equation takes the derivative in the direction of the variation of the variational equation.
That means:
The strategy of the variational approach to solving the catenary problem consists of differentiating the potential energy with respect to the vertical position coordinate.
That is to say:
The variational approach to solving the catenary problem consists of transforming the variational expression to the corresponding force equilibrium expression.
Discussion
As we know: whereas for many types of equation the solution is a value, the solution to a differential equation is a function. The solution space of a differential equation is a space of functions.
That is enforced by the demand that the differential relation stated in the equation must be satisfied for all parts of the curve concurrently. In that sense a differential equation is intrinsically a global equation; it is to be satisfied everywhere concurrently.
A variational equation has that property too: the solution to a variational equation is a function. The solution space of a variational equation is a space of functions.
The catenary problem has the following property:
Every subsection of the catenary problem is itself an instance of the catenary problem.
We can divide in subsections, and solve down at subsection level. In effect the solutions at subsection level are concatenated to the overall solution. (In a numerical analysis implementation of variational approach that type of subdivision is used.)
There is no limit to the level of subdivision; the divisibility in subsections extends all the way to infinitesimally small subsections.
I will refer to that property of a problem as being concatenable.
By contrast, take the traveling salesman problem
That problem is not concatenable.
A solution for a subsection of the set of nodes is highly unliky to be part of the solution for an expanded set of nodes.
In order for a problem to yield to variational approach the problem must be concatenable.
