First I will try to convince you how gaps can appear the linear case, which is less contentious.
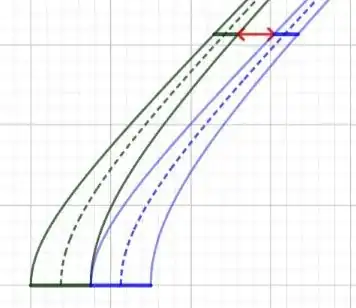
In the above diagram the two objects (which are initially adjacent to each other with no gap) are individually accelerated in a Born rigid manner so that they are allowed to length contract naturally and maintain a constant proper length in their rest frames. Each object has the same proper acceleration as the other, at any instant in the original inertial reference frame. The front of the blue train accelerates the same as the front of the green train and the same for any part of the trains. The centre to centre (or back to back or front to front) distance remains constant at any instant in the original inertial reference frame. As can be seen (red segment) a gap opens up which can be larger than the length of the objects themselves. This is simply what physically happens and what can be measured, fully in accord with Special Relativity.
You can imagine drawing many of these trains end to end in a straight line on paper and then rolling the paper into a cylinder. You will then end up with something that looks very much like the last two diagrams posted by Nullius. The main difference is my diagram shows the instantaneous length measured by the inertial observer that does not accelerate, while his diagrams show the tilted lines of simultaneity of the segments. Strictly speaking the lines of simultaneity should tilt the other way, due the rear of the segments accelerating faster than the front of the segments and traveling further through space time.
Now for the circular case:
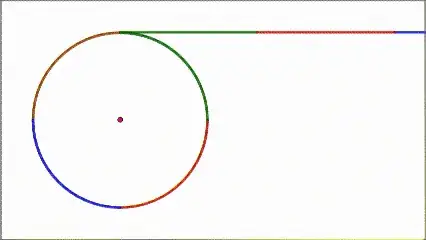
As can be seen the circulating trains individually length contract with increasing inter train gaps, just as in the linear case. Due to the Born rigid acceleration, the individual circulating trains maintain their proper length at all times during the acceleration phase.
It can be shown that accelerating each train with equal proper acceleration is the natural behaviour. Consider Einstein's rotating disk. If rulers are pinned on the periphery at their front ends and the trailing ends left free to length contract, when the disk is spun up, each ruler will experience the same proper acceleration at any instant at the pinned end. In fact the any point on a given ruler will experience the same instantaneous proper acceleration as the equivalent point on any other ruler on the periphery.
As for concerns about centripetal and centrifugal forces this can be made negligible. The proper centripetal force experienced by observers riding on the trains is $$F_c = \gamma (m \omega^2 R) = \frac{m v_t^2}{R\sqrt{1-v_t^2/c^2}}$$ where $v_t$ is the instantaneous tangential velocity. For a constant final tangential velocity, the only variable is $R$ and the centripetal force can be made arbitrarily small by making $R$ arbitrarily large.
In the animation all the trains (linear and circulating) maintain the same length as measured by comoving observers and there is no stress or strain parallel to the motion due to the Born rigid acceleration.
The circulating trains animation also illustrates another relativistic concept, the "Momentarily Comoving Inertial Frame MCIF". This concept allows SR to be extended to handle accelerating objects, and says that over a small enough temporal and spatial interval the time dilation and length contraction of an accelerating (linear or circular) object is exactly the same as that of an inertial reference frame that is momentarily comoving with an infinitesimal part of the object. This equivalence of the length contraction of the linear and circulating trains can clearly be seen in the gif, even during the acceleration phase.
Its not hard to imagine that if the circulating trains were connected with thin elastic bands, the bands would be stretched and have a measurable tension. If the four trains are connected by inelastic couplings, it is easy to see that the trains would be stretched in the their own rest frames and under enormous tension. This is why reason the Ehrenfest cylinder is considered to have to physically deform when its angular velocity is increased.
Another thing to bear in mind is that while SR can handle acceleration, the standard Lorentz transforms cannot. The standard transforms assume the observer and observed object have had constant velocity relative to each forever, In the accelerating cases, it is important to take into account whether it was the observer or the observed that accelerated. For example, if I accelerate relative to another rocket, reach a constant velocity and resynchronise my clocks, I will observe the clock at the rear of the unaccelerated rocket to be ahead of the clock at the front exactly as predicted by the Lorentz transform. Now if I remain stationary and observe the other rocket accelerate to a final constant velocity, the clocks at the rear of the accelerating rocket will be retarded instead of advanced, relative the clocks at the front. This is because after the accelerating rocket has accelerated, the rear of the rocket has travelled further than the front of the rocket due to length contraction and the clock at the rear will have experienced more time dilation.
Edit: While measuring 'global' distances in a rotating frame is difficult due to being unable to synchronise the clocks all the way around, it is possible to make sensible local measurements for a cylinder with constant angular velocity. For example, we could place a ruler on the rim of the Ehrenfest cylinder and we can place clocks at either end of the local ruler. It is possible to synchronise the clocks locally. We can then measure the radar length of the ruler and find the local radar length is the same whichever end we measure from. This local radar length is the proper length of the ruler.
A final thought. Imagine the rulers on Einstein disk are pinned at both the front at back while the disk is stationary. As the disk is spun up, the rulers are force to maintain the same length measured in the inertial reference frame of the observers outside the disk. This means the proper length of the rulers is stretched in their own reference frame as measured by comoving observers on the rotating disk and they come under tension just as the string does in Bell's rocket paradox.





