My Physics teacher was deriving the 'Work-Energy Theorem' for a single particle in the class; where after doing the vector addition of all the forces acting on the particle, he put the resultant of all those forces equal to the product of mass and acceleration of the particle, which was totally correct for me.
After that, he put the acceleration as $v(dv/dx)$, so that he could derive the theorem after integrating all the forces with respect to $x$ (which is displacement) and integrating velocity of the object with respect to $v$ (which is velocity itself); and thus equating the sum of work done by all the forces on the object with change in the kinetic energy of the object.
This was also correct in my sight during the class when he was explaining, but later on while studying the class-notes by myself, I got confused in the step in which he put acceleration as $v(dv/dx)$. I was not able to understand how the acceleration which had been written with the vector sign (I mean, the arrow above any vector quantity), could be substituted with v(dv/dx), which do not have any vector sign.
To solve this problem, I thought to add the vector sign (the arrow, again) in the latter, but there, the main problem had arisen, for which I am writing this question, which was, "which quantity/quantities is/are vector quantity/quantities in $v(dv/dx)$?".
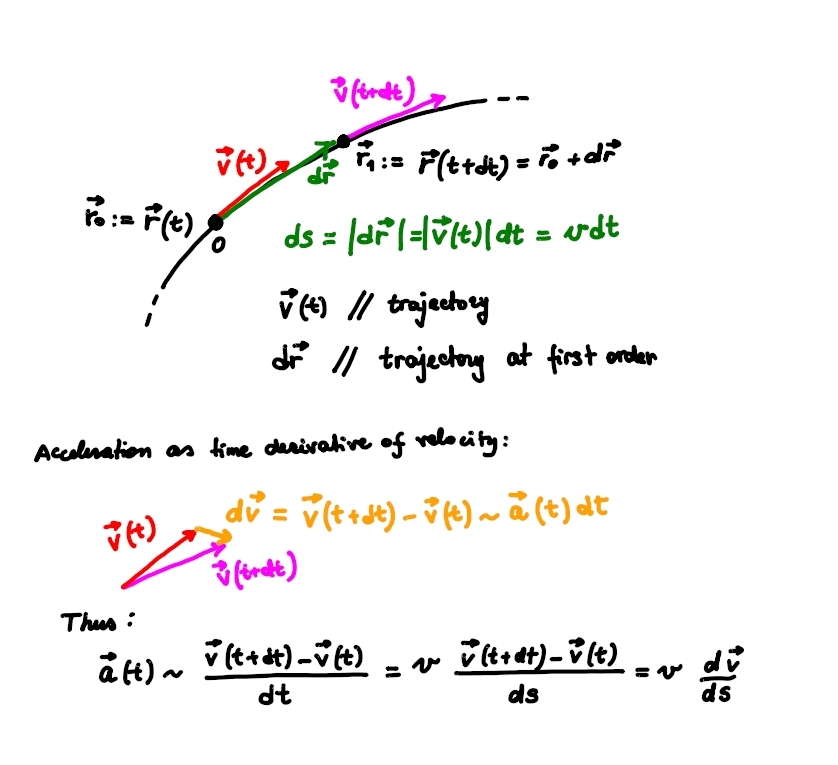
In simpler words, how can I write $a = v(dv/dx)$ vectorially?
A good example of what I am asking could be $F = ma$, which can also be written as $F$ (with vector sign) = mass times acceleration (with vector sign). In the same way, how can I write $a = v(dv/dx)$, with the vector sign?