Some comments on the updated question.
The particular gyro wheel demo starting at 7:02 into the gyro demo video that you linked to:
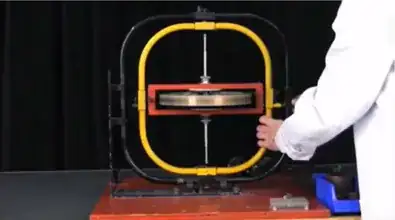
I will refer to the particular model of gyroscope used from 7:02 on as 'Pasco Demonstration Gyroscope'
While it is the case that the demonstrator uses an electric motor to (friction) spin up the gyro wheel, that wheel is not spinning fast. It's just that the surface of that wheel is so smooth: you can't assess the rate of spin.
What does give a clear indication of the rate of spin is the rate of nutation. Rate of nutation and rate of spin are correlated. (The moment of inertia of the counterweight relative to the swivel point causes the rate of nutation to be slower, but not much slower.)
Also: when the demonstrator manipulates the device very little force is sufficient to have a visible effect, again indicating that the rate of spin is quite slow.
In the updated version of your question you also refer to a setup that you describe as 'a 3 axis gimbal mounted gyro, but with the axis of precession locked'
Here's the thing: the key factor in gyroscopic precession is motion.
At 7:31 into the video the demonstrator adds a weight, so that there is a surplus of weight on the gyro wheel side. Once the gyro wheel is precessing: it is the precessing motion that gives rise to a tendency of the gyro wheel to pitch up. The gyro wheel settles on a rate of precesssion such that the tendency to pitch up matches the tendency from gravity to pull the surplus weight down.
When motion is prevented (locked axis) then the phenomenon of gyroscopic precession is prevented.
What that means is that preventing precessing motion is not in any way informative.
About nutation:
Nutation can occur both with and without an overall gyroscopic precession.
In the video, after spinning up the gyro wheel there is already a small nutation (in addition to the precessing motion) Then the demonstrator gives the precessing gyro setup a bit of a whack. The nutation caused by that whack has a larger amplitude than the initial nutation; it has the same frequency.
With a gyro setup that is balanced (hence no precessing motion): the same whack would give the same amplitude of nutation.
Incidentally:
We have that with any form of gyro wheel suspension the setup has more inertial mass than just the inertial mass of the gyro wheel.
An interesting case is the case where there is no suspension. For instance, a gyro wheel in an orbiting space station doesn't need suspension.
The dynamics of purely a gyro wheel, with no other inertial mass, is known under the name 'Feynman's wobbling plate'
To your question in the comment section:
The gimbal mounted gyro that you are referring to:
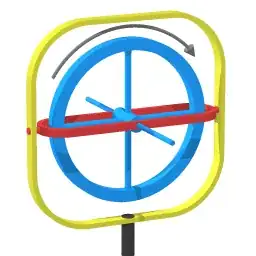
That particular demonstration gyro has been in use for a long time, I've seen it in different videos. Back when I created a diagram I used the same color scheme for the two gimbal rings:
So:
Let's say the yellow frame is fitted with a torque sensing device, in such a way that when the yellow frame tends to swivel the torque sensor tells you the magnitude of the torque.
There is a relation between rate-of-precession and torque.
For the orientation of the gyro wheel as depicted in the diagram:
When a small weight is added such that there is a down-pitching torque there is a corresponding rate of precession (and direction of precession) such that the precessing motion gives a tendency to pitch up that offsets the downward torque from the added weight.
The larger the mass of the added weight the faster the precessing motion needs to be in order to offset the torque from the added weight.
That relation works the other way round too:
given a particular angular velocity of the gyro wheel there will be a specific added weight such that the corresponding precession rate is one revolution every ten seconds.
When you make the gyro wheel pitch then in response to that motion the gyro wheel tends to swivel. If you make the angular velocity of the pitching motion such that it corresponds to one revolution per ten seconds then the tendency to swivel will correspond to the same torque that corresponds to a precession rate of one revolution per ten seconds.
I define three axes:
- Roll axis - the gyroscope wheel spins around the roll axis.
- Pitch axis - motion of the red frame. As you can see, the gimbal mounting ensures the pitch axis is perpendicular to the roll axis.
- Swivel axis - motion of the yellow frame.
When the gyro wheel (in the orientation depicted in the diagram) is being turned around the swivel axis then in response the gyro wheel will go to pitching motion.
Likewise:
When the gyro wheel is being turned around the pitch axis then in response the gyro wheel will go to swiveling motion.
About the initial torque: in order to start motion a torque must be applied. It is the motion that elicits the gyroscopic response.
Gyroscopic response is what sustains nutation:
Pitching down elicits swiviling motion, that swiveling motion elicits pitching up, pitching up elicits swiveling motion in the other direction, and that brings the cycle back to pitching down.


{kind=link}