lets look at this pendulum example,
from the free body diagram you obtain :
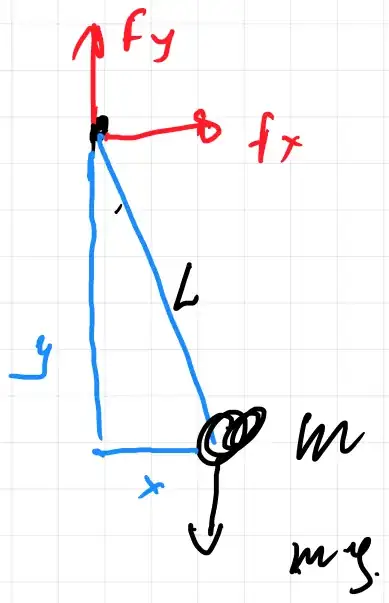
the EOM's with Newton second law
$$m\,\ddot x-F_x=0\\
m\,\ddot y+m\,g-F_y=0$$
where $~F_x~,F_y~$ are the constraint forces at the pivot.
additional you have the constraint equation
$$f(x,y)=x^2+y^2-L^2=0$$
if you apply the EL with the kinetic energy
$$T=\frac m2\,(\dot x^2+\dot y^2)$$
and the potential energy
$$U=-m\,g\,y+\lambda\,(x^2+y^2-L^2) $$
you obtain the EOM's
$$m\,\ddot x-\lambda\,2\,x=0\\
m\,\ddot y-\lambda\,2\,y=0$$
hence
$$F_x=\lambda\,2\,x=\lambda\frac{\partial f(x,y)}{\partial x}\\
F_y=\lambda\,2\,y=\lambda\frac{\partial f(x,y)}{\partial y}$$
or with $~Q_1=F_x~,Q_2=F_y~,q_1=x,q_2=y$
$$Q_j=\lambda\,\frac{\partial f}{q_j}$$
notice that unit of $~Q_j~$ is [N], so the unit of $~\lambda~$ in this case is
$~[N/m]$
