So during a typical collision calculation with no friction, there is a single impulse $J$ along the contact normal that is applied in equal and opposite measure on the colliding bodies. This impulse is calculated by
$$ J = (1+\epsilon)\, m^\star\, v_{\rm imp} $$
where $\epsilon$ is the coefficient of restitution, $m^\star$ is the reduced mass of the system and $v_{\rm imp}$ is the impact speed.
For your situation where friction (and rotation) are important you have two impulses acting, $J_n$ for normal impulse (as above) and $J_t$ for frictional impulse.
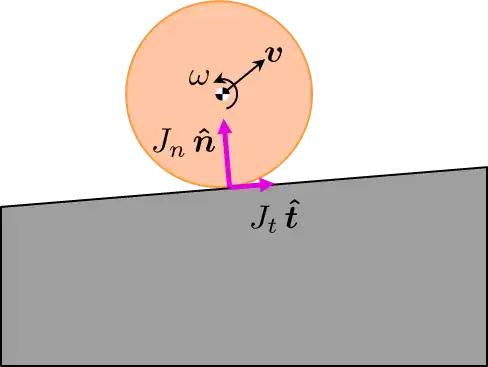
The reduced mass calculation is different for both impulses because they act on different directions. Use the link above to get the equation for calculating each of the reduced massed based on the directions $\boldsymbol{\hat{n}}$ and $\boldsymbol{\hat{t}}$.
$$m_{\rm reduced} = \left[\tfrac{1}{m_{1}}+\tfrac{1}{m_{2}}+\left(\hat{n}\times\vec{c}_{1}\right)\cdot I_{1}^{-1}\left(\hat{n}\times\vec{c}_{1}\right)+\left(\hat{n}\times\vec{c}_{2}\right)\cdot I_{2}^{-1}\left(\hat{n}\times\vec{c}_{2}\right)\right]^{-1}$$
Here you can assume the object is hitting the ground and so $\tfrac{1}{m_2} = 0$ and $I_2^{-1} = 0$ to simplify the above a bit. Further simplifications exists for 2D problems (also in the link above).
Also the impact speed is different for the directions, and again the link above has the equation needed to calculate those.
$$v_{{\rm imp}}=\hat{n}\cdot\left(\vec{v}_{1}+\vec{c}_{1}\times\vec{\omega}_{1}-\vec{v}_{2}-\vec{c}_{2}\times\vec{\omega}_{2}\right)$$
The third part is a bit debatable. What coefficient of restitution to use for frictional impulse? Is it the same as the value to be used for bounce? Is it 0, or is it 1. I remember a discussion in this forum about this and it was stated to use $\epsilon_t = 1$ which is counter intuitive at first but might match data takes from supper bouncy balls.
I recommend you play around with this and find something that produces reasonable results.
Once the impulses are calculated, then again the link above has the equations of how an impulse will change the motion of the body. I am modifying the above to include both impulses
$$\begin{aligned}
\Delta\vec{v}_{1} & =-\tfrac{J_n \hat{n} + J_t \hat{t}}{m_{1}}&\Delta\vec{v}_{2} & =+\tfrac{J_n \hat{n} + J_t \hat{t}}{m_{2}}\\
\Delta\vec{\omega}_{1} & =-I_{1}^{-1}\left(-\vec{c}_{1}\times(J_n \hat{n} + J_t \hat{t})\right)&\Delta\vec{\omega}_{2} & =+I_{2}^{-1}\left(-\vec{c}_{2}\times(J_n \hat{n} + J_t \hat{t})\right)
\end{aligned}$$
References
