We use the idea that if a body collides with something, then its angular momentum is conserved with respect to the point of impact.
This is a direct result of Newton's 3rd law. During impact, there is an exchange of momentum between the bodies impacted. This exchange happens along a line called the axis of percussion defined by the momentum vector and the point of contact.
If you were to take the moment of momentum (torque of impulse) about this line the result would be zero. This is what this statement says.
A better way to describe the situation would be just to say the impulses exchange momentum between two bodies along a line in space. Or the corollary if an impulsive force has zero moment (angular momentum) about a point, then the action of the force goes through this point.
Also, since the impact happens at an infinitesimal time slice, only the impulse forces are considered as all other regular forces need a finite time interval to act.
In the diagram below I have separated the bodies out to show Newton's 3rd law in action.
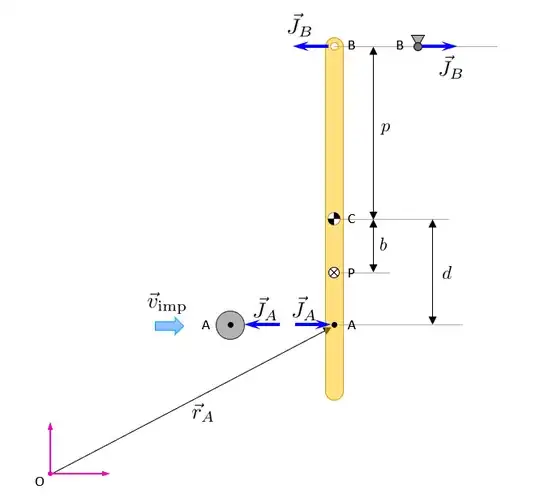
The impulse $\vec{J}_A$ acting on the impacted body (the hanging bar) at an arbitrary point A, has angular momentum about the origin of
$$ \vec{L}_O = \vec{r}_A \times \vec{J}_A $$
But if you sum up the angular momentum about the point of contact, then
$$ \vec{L}_A = 0 $$
What angular momentum really tells you is where the line of action of the impulse is in space.
An equal and opposite impulse $\vec{J}_A$ acts on the impacting body, which means that total momentum is conserved.
At the same time a reaction impulse $\vec{J}_B$ develops on the pivot, which again due to Newton's 3rd law keep the total momentum the same when considering the body and the earth as as system. Otherwise the reaction impulse $\vec{J}_B$ acts on the body changing the total momentum of the system.
The equations of motion describe the change in motion due to the impulses. In 2D these are
$$ \begin{aligned}
J_A - J_B & = m \Delta v \\
d\,J_A + p\, J_B & = I \Delta \omega \\
\end{aligned}$$
But you also have the kinematics which state that
$$ \Delta v = p\, \Delta \omega$$
These have the solution of
$$\begin{aligned}
\Delta \omega & = \tfrac{ d+p }{I + m p^2} J_A \\
J_B &= \tfrac{I - m\, d\, p}{I+m p^2} J_A
\end{aligned} $$
You can immediately see that when $d = \frac{I}{m p}$ there is no reaction impulse, and we designate the point as the center of percussion $b = \frac{I}{m p} = \frac{\kappa^2}{p}$ where $\kappa$ is the radius of gyration of the object.

