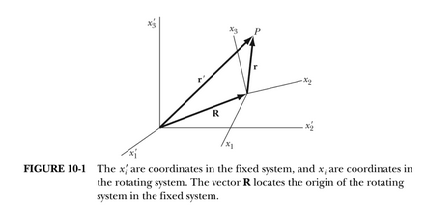
In Thornton & Marion's Classical Dynamics, the following relation is given for the rate of change of an objects position in the two coordinate systems (according to the picture shown at the bottom): $$ \bigg(\frac{\text{d}\vec{r}}{\text{d}t}\bigg)_{\text{fixed}} = \bigg(\frac{\text{d}\vec{r}}{\text{d}t}\bigg)_{\text{rotating}} + \vec{\omega} \times \vec{r}, $$ which, when applied to the coordinate change $ \vec{r}' = \vec{R} + \vec{r} $, yields the velocity relation $$ \bigg(\frac{\text{d}\vec{r}'}{\text{d}t}\bigg)_{\text{fixed}} = \bigg(\frac{\text{d}\vec{R}}{\text{d}t}\bigg)_{\text{fixed}} + \bigg(\frac{\text{d}\vec{r}}{\text{d}t}\bigg)_{\text{rotating}} + \vec{\omega} \times \vec{r}. $$ However, I this specification of fixed/rotating seems unnecessary, when all information regarding the transformation is encapsulated within $ \vec{r}'(t) = \vec{R}(t) + \vec{r}(t) $, with $ \vec{R}(t) = R(t)\hat{u}(t) $, provided that I correctly differentiate the changing unit vectors. Differentiating, applying Newton's 2nd law, I get what seems to be an almost correction derivation of fictitious forces, $$ \vec{F}'(t) = m \vec{a}(t) + m \frac{\text{d}\vec{\omega}(t)}{\text{d}t} \times \vec{R}(t) + m \frac{\text{d}^2 R(t)}{\text{d}t^2}\hat{u}(t) + 2 m \vec{\omega}(t) \times \vec{V}(t) + m \vec{\omega}(t) \times \big(\vec{\omega}(t) \times \vec{R}(t) \big) $$ with $ \vec{V}(t) = \hat{u}\cdot\text{d} R(t) / \text{d}t $, which is exactly correct in that this includes an Euler force, a linear acelleration term, a Coriolis term, and a centrifugal term... except that the Coriolis term provided by Marion points in the direction of $ \vec{\omega} \times \big( \text{d}\vec{r}/\text{d}t \big)_{\text{rotating}} $, rather than $ \vec{\omega} \times \vec{V} $! It depends on the velocity in the unprimed frame, rather than the velocity of the moving frame itself.
I can't find where my reasoning goes wrong, as my derivation all flows from the (seemingly true) fact that $$ \frac{\text{d}\vec{r}'(t)}{\text{d}t} = \frac{\text{d}\vec{r}(t)}{\text{d}t} + \frac{\text{d}\vec{R}(t)}{\text{d}t} = \frac{\text{d}\vec{r}(t)}{\text{d}t} + \frac{\text{d}R(t)}{\text{d}t}\hat{u}(t) + R(t) \frac{\text{d}\hat{u}(t)}{\text{d}t} = \frac{\text{d}\vec{r}(t)}{\text{d}t} + \vec{V}(t) + \vec{\omega}(t) \times \vec{R}(t) $$ I feel that my machinery is close. When the entirety of the information regarding the rotating and stationary frames is completely determined by the vector addition of position vectors, why on earth does one need to introduce this bizarre notation of fixed/rotating in the derivatives?
This is all to say, isn't the definition of $ \big( \text{d} \vec{r} / \text{d} t \big)_{fixed} $ literally the exact same thing as $\text{d}\vec{r}' / \text{d}t = \text{d} \big( \vec{R} + \vec{r} \big) / \text{d}t$? All information regarding rotation can be captured by $ \vec{R}(t) = R(t)\hat{u}(t) $ alone, so why introduce the parenthesis-frame notation?