If you happen to have the Third Edition of Classical Electrodynamics by John David Jackson, turn to section 11.8, as that's where I'm getting all this from. If not, you should still be able to follow along.
In said section, Jackson gives us this equation that relates any physical vector G in a rotating vs. non-rotating reference frame:
$\left(\frac{d\mathbf{G}}{dt}\right)_{nonrot} = \left(\frac{d\mathbf{G}}{dt}\right)_{rest frame} + \boldsymbol{\omega}_T \times \mathbf{G}$
where
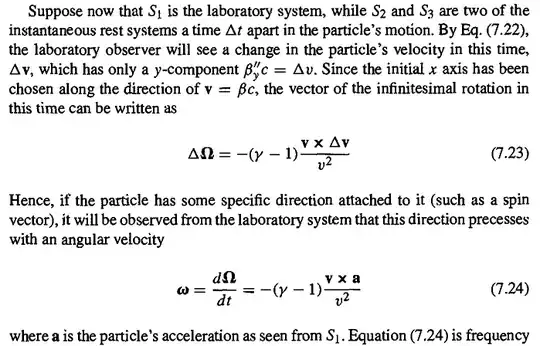
$\boldsymbol{\omega}_T = \frac{\gamma^2}{\gamma+1}\frac{\mathbf{a}\times\mathbf{v}}{c^2}$
"where a is the acceleration in the laboratory frame," according to the textbook. Also, gamma is defined using v, the velocity of the particle as measured in the lab frame.
Ok. So I decided to check this by setting G = x, the position vector, for a particle that is undergoing circular motion in the laboratory frame. So we have
$\left(\frac{d\mathbf{x}}{dt}\right)_{nonrot} = \mathbf{v}$
and
$\left(\frac{d\mathbf{x}}{dt}\right)_{rest frame} = 0$ because the particle doesn't have any velocity in its own frame (right?).
So far so good (I think). Now, this implies that $\boldsymbol{\omega}_T \times \mathbf{x} = \mathbf{v}$. So if we can verify this using the definition of $\boldsymbol{\omega}_T$, we're golden. However, if you use the fact that $|a| = \frac{v^2}{|x|}$ for circular motion as well as the fact that a is perpendicular to v, and that a is (anti)parallel to x, and carefully apply the right hand rule, you'll find, after the algebraic dust settles, that
$\boldsymbol{\omega}_T \times \mathbf{G} = (1-\gamma)\mathbf{v}$
So this is definitely a contradiction. Because it implies that $\mathbf{v} = (1-\gamma)\mathbf{v}$. Can anyone tell me where this went horribly horribly wrong? I worked on this with my professor for two hours yesterday and we couldn't figure it out.