Not a book recommendation, but a quick overview of the process in hopes to fill some holes in your understanding, or to spark the correct questions to ask.
1. How do I calculate the kinetic energy of a connected system of rigid bodies?
Like you mention in your post, you need to know the the translational velocity of each body center of mass $\boldsymbol{v}_i$, the rotational velocity $\boldsymbol{\omega}_i$ of each body, and the mass moment of inertia tensor $\mathbf{I}_i$ of each body at each center of mass. Then you can evaluate
$$ \mathrm{KE} = \sum_i \tfrac{1}{2} \boldsymbol{v}_i \cdot (m_i \boldsymbol{v}_i) + \sum_i \tfrac{1}{2} \boldsymbol{\omega}_i \cdot (\mathbf{I}_i \boldsymbol{\omega}_i) $$
where $\cdot$ is the vector dot product.
2. How do I calculate the kinematics (motion) in such systems
This is complex task becauses there are a lot of details to consider. Nevertheless once you know what you know it is rather straightforward. This process works for all systems that can be viewed as a tree structure with one root body connected to the ground, and then one or more children bodies each connected with a 1-DOF joint to its parent body. So each body is a attached to end "top" of only one joint.
Position Kinematics
Recursively starting from the root object you calculate the position and orientation of the top of each joint $\boldsymbol{d}_i$ as well as the position of the center of mass $\boldsymbol{r}_i$ for the body attached to the joint. The orientation is described using a 3×3 rotation matrix $\mathbf{E}_i$. Each is a function of the joint degree of freedom $q_i$, which is either a distance or an angle value depending on the type of joint.
$$ \begin{aligned}
\boldsymbol{d}_i & = \boldsymbol{d}_{i-1} + \mathbf{E}_{i-1} \,\left(\mathrm{base}_i+ \mathrm{pos}(q_i) \right)\\
\mathbf{E}_i & = \mathbf{E}_{i-1} \,\mathrm{ori}(q_i) \\
\boldsymbol{r}_i & = \boldsymbol{d}_i + \mathbf{E}_i \mathrm{cg}_i\\
\hline
\boldsymbol{d}_0 & = \boldsymbol{0} \\
\mathbf{E}_0 &= \mathbf{1}_{3×3}
\end{aligned} $$
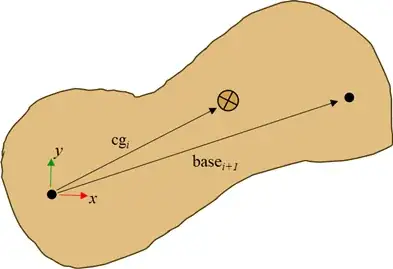
Note that $\mathrm{base}_i$ is the location of the "base" of each joint in local coordinates of the previous body. For example a link of length $\ell$ with the next body connected along the x-axis then $\mathrm{base}_i = \pmatrix{\ell \\ 0 \\ 0}$. Similarly $\mathrm{cg}_i$ is the location of the center of mass. See below for a diagram of this
Some example joints is described below:
$$ \begin{array}{r|c|c|c|c}
\text{type} & q_i & \mathrm{pos}(q_i) & \mathrm{ori}(q_i) & \text{axis}_i \\
\hline
\text{slider along }\hat{i} & x_i & \pmatrix{x_i \\ 0 \\ 0} & \pmatrix{1&0&0 \\ 0&1&0 \\ 0&0&1} & \pmatrix{1\\0\\0}\\
\text{rotate about }\hat{k} & \theta_i & \pmatrix{0\\0\\0} & \pmatrix{\cos \theta_i & -\sin\theta_i & 0 \\ \sin\theta_i & \cos\theta_i & 0 \\ 0&0&1 } & \pmatrix{0\\0\\1}
\end{array} $$
Velocity Kinematics
By direct differentiation of the position kinematics, the velocity kinematics are also found recursively. The velocity of the "top" of the joint is $\dot{\boldsymbol{d}}_i$ while the velocity of the body center of mass is $\boldsymbol{v}_i = \dot{\boldsymbol{r}}_i$
$$ \begin{aligned}
\dot{\boldsymbol{d}}_i & = \begin{cases}
\dot{\boldsymbol{d}}_{i-1} + \boldsymbol{\omega}_{i-1} \times \left( \boldsymbol{d}_i - \boldsymbol{d}_{i-1} \right) + \mathbf{E}_{i-1}( \mathrm{axis}_i \, \dot{q}_i) & \text{slider} \\
\dot{\boldsymbol{d}}_{i-1} + \boldsymbol{\omega}_{i-1} \times \left( \boldsymbol{d}_i - \boldsymbol{d}_{i-1} \right) & \text{rotate}
\end{cases} \\
\boldsymbol{v}_i & = \dot{\boldsymbol{d}}_i + \boldsymbol{\omega}_i \times ( \boldsymbol{r}_i - \boldsymbol{d}_i )\\
\boldsymbol{\omega}_i & = \begin{cases}
\boldsymbol{\omega}_{i-1} & \text{slider} \\
\boldsymbol{\omega}_{i-1} + \mathbf{E}_{i-1} (\mathrm{axis}_i\,\dot{q}_i) & \text{rotate}
\end{cases} \\ \hline
\dot{\boldsymbol{d}}_0 & = \boldsymbol{0} \\
\boldsymbol{\omega}_0 & = \boldsymbol{0}
\end{aligned}$$
where $\times$ is the vector cross product.
3. How do I calculate the mass properties of each body
This is slightly more straightforward as it only involves transforming the body aligned mass matrix $\mathbf{I}_{\rm body}$ into the world coordinate system using the body rotation matrix $\mathbf{E}_i$
$$ \mathbf{I}_i = \mathbf{E}_i \, \mathbf{I}_{\rm body} \, \mathbf{E}_i^\intercal $$
where ${}^\intercal$ is the matrix transpose operator.