This is just a footnote to user8718165's answer. What I'm going to do is address the question in your final paragraph:
For example, let us consider that a cuboid is tilted in such a way that its centre of mass is no longer supported. Would the torque obtained by availing centre of mass be same as that of what is obtained by availing individual point masses/elemental masses?
and show that the torque obtained by availing centre of mass is the same as that of what is obtained by availing individual point masses/elemental masses. We'll do this by showing the two ways of calculating the torque give the same result. Start with the diagram sowing the forces on the tilted cube:
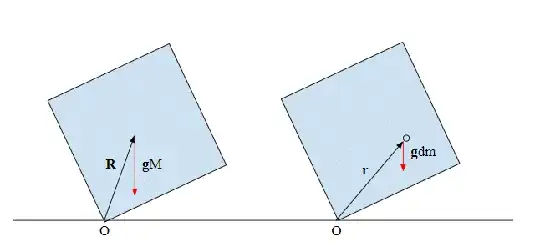
On the left we do the calculation using the centre of mass. The torque due to a force $\mathbf F$ at a position given by the vector $\mathbf R$ is:
$$ \tau = \mathbf R \times \mathbf F $$
where $\times$ is the cross product. On the left the force acting at the centre of mass is just $\mathbf g M$. We take the corner of the cube $O$ as our origin so the psition of the centre of mass is given by the vector $\mathbf R$ and the torque is:
$$ \tau = \mathbf R \times \mathbf g M \tag{1} $$
Now look at the right diagram. This time we'll take some infinitesimal mass $dm$ at some position $\mathbf r$. The force due to $dm$ is $\mathbf g dm$ so the torque is:
$$ d\tau = \mathbf r \times \mathbf g dm $$
And the total torque is given by integrating:
$$ \tau = \int \mathbf r \times \mathbf g dm \tag{2} $$
So to answer your question we have to show that the torque calculated in the two ways, i.e. using the equations (1) and (2), is the same. And this is really easy. We start with the definition of the centre of mass position:
$$ \mathbf R = \frac{1}{M} \int \mathbf r dm \tag{3} $$
Take equation (1) and substitute for $\mathbf R$ using eqution (3) to give:
$$ \tau = \left( \frac{1}{M} \int \mathbf r dm \right) \times \mathbf g M = \left( \int \mathbf r dm \right) \times \mathbf g $$
And you need to know that for the vectors $\mathbf a$, $\mathbf b$ and $\mathbf c$ we have the identity:
$$ (\mathbf a + \mathbf b) \times \mathbf c = \mathbf a \times c + \mathbf b \times c $$
and that means we can bring the cross product with $\mathbf g$ inside the integral to get:
$$ \tau = \left( \frac{1}{M} \int \mathbf r dm \right) \times \mathbf g M = \left( \int \mathbf r dm \right) \times \mathbf g = \int \mathbf r \times \mathbf g dm $$
And this is just our equation (2). So we've shown that equations (1) and (2) are the same i.e. they give the same torque.

