Your matrix is the right one. The matrix given by Susan Lea is incorrect.
The matrix for the transformation of coordinates from an initial cartesian right-handed system of coordinates $\;Ox_1x_2x_3\;$ to another cartesian right-handed system of coordinates $\;Ox'_1x'_2x'_3\;$ rotated with respect to the first around a direction $\;\mathbf{n}=\left(n_1,n_2,n_3\right),\Vert\mathbf{n}\Vert=1, \;$ through an angle $\;\theta\;$ (positive if counterclockwise with respect to $\;\mathbf{n}$)
is(1)
\begin{equation}
\mathbb{A}\left(\mathbf{n}, \theta\right)=
\begin{bmatrix}
\cos\theta+(1-\cos\theta)n_1^2&(1-\cos\theta)n_1n_2+\sin\theta n_3&(1-\cos\theta)n_1n_3-\sin\theta n_2 \vphantom{\dfrac12}\\
(1-\cos\theta)n_2n_1-\sin\theta n_3&\cos\theta+(1-\cos\theta)n_2^2&(1-\cos\theta)n_2n_3+\sin\theta n_1\vphantom{\dfrac12}\\
(1-\cos\theta)n_3n_1+\sin\theta n_2&(1-\cos\theta)n_3n_2-\sin\theta n_1&\cos\theta+(1-\cos\theta)n_3^2\vphantom{\dfrac12}
\end{bmatrix}
\tag{01}\label{eq01}
\end{equation}
So, the transformation matrices around axes $\;x_1,x_2,x_3\;$ through angles $\;\theta_1,\theta_2,\theta_3\;$ respectively are
\begin{align}
\mathbb{A}\left(x_1, \theta_1\right)& =
\begin{bmatrix}
\hphantom{-}1 & \hphantom{-}0 & 0 \vphantom{\dfrac12}\\
\hphantom{-}0 & \hphantom{-}\cos\theta_1 & \sin\theta_1\vphantom{\dfrac12}\\
\hphantom{-}0 & -\sin\theta_1 & \cos\theta_1\vphantom{\dfrac12}
\end{bmatrix}
\tag{02.1}\label{eq02.1}\\
\mathbb{A}\left(x_2, \theta_2\right)& =
\begin{bmatrix}
\cos\theta_2 & \hphantom{-}0 & -\sin\theta_2\vphantom{\dfrac12}\\
0 & \hphantom{-}1 & \hphantom{-}0 \vphantom{\dfrac12}\\
\sin\theta_2 & \hphantom{-}0 & \hphantom{-}\cos\theta_2\vphantom{\dfrac12}
\end{bmatrix}
\tag{02.2}\label{eq02.2}\\
\mathbb{A}\left(x_3, \theta_3\right)& =
\begin{bmatrix}
\hphantom{-}\cos\theta_3 & \sin\theta_3 & 0 \hphantom{-} \vphantom{\dfrac12}\\
-\sin\theta_3 & \cos\theta_3 & 0 \hphantom{-}\vphantom{\dfrac12}\\
\hphantom{-}0 & \hphantom{-}0 & 1\hphantom{-} \vphantom{\dfrac12}\\
\end{bmatrix}
\tag{02.3}\label{eq02.3}
\end{align}
After a careful look in above equations we note that in the cases of rotation around $\;x_1,x_3\;$ [equations \eqref{eq02.1},\eqref{eq02.3}] the term $\;\boldsymbol{+}\sin\theta_\jmath\;$ is up-right while the term $\;\boldsymbol{-}\sin\theta_\jmath\;$ is bottom-left. But in the case of $\;x_2$, equation \eqref{eq02.2}, we have the inverse : the term $\;\boldsymbol{+}\sin\theta_3\;$ is bottom-left while the term $\;\boldsymbol{-}\sin\theta_3\;$ is up-right. In this difference lies the error in Susan Lea, see Figure below (page extracted from $^{\prime}$Student Solutions Manual for Mathematics for Physicists$^{\prime}$ by Susan Lea)
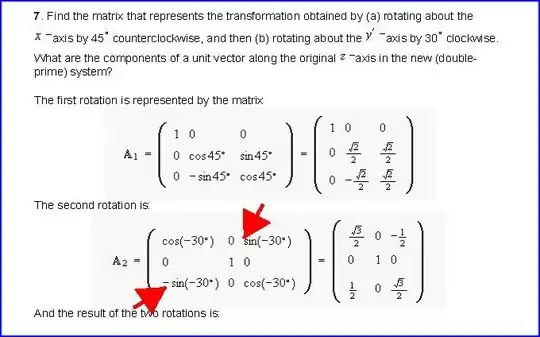
The corrected matrix $\;\mathbb{A}_2\;$ must be
\begin{equation}
\mathbb{A}_2=
\begin{pmatrix}
\cos\left(-30^\circ\right) & \hphantom{-}0 & -\sin\left(-30^\circ\right)\vphantom{\dfrac12}\\
0 & \hphantom{-}1 & \hphantom{-}0 \vphantom{\dfrac12}\\
\sin\left(-30^\circ\right) & \hphantom{-}0 & \hphantom{-}\cos\left(-30^\circ\right)\vphantom{\dfrac12}
\end{pmatrix}
=
\begin{pmatrix}
\hphantom{-}\frac{\sqrt{3}}{2} & \hphantom{-}0 & \hphantom{-}\frac{1}{2}\vphantom{\dfrac12}\\
\hphantom{-}0 & \hphantom{-}1 & \hphantom{-}0 \vphantom{\dfrac12}\\
-\frac{1}{2} & \hphantom{-}0 & \hphantom{-}\frac{\sqrt{3}}{2}\vphantom{\dfrac12}
\end{pmatrix}
\tag{03}\label{eq03}
\end{equation}
(1)
For the matrix of equation \eqref{eq01} see equation (08) in my answer there : Rotation of a vector. But since this matrix of equation (08) therein concerns the rotation of a vector (active view) we replace $\;\theta\;$ by $\;\boldsymbol{-}\theta\;$ to get the matrix \eqref{eq01} herein in order to have the transformation of coordinates (passive view).
