The lift to drag coefficient is $C_l/C_d$. The metric is important, as it basically dictates the energy consumption per unit distance traveled per unit mass, regardless of how fast the thing is traveling or how big it is.
I found some interesting references that show that this lift to drag ratio drops like a rock for small Reynolds numbers.
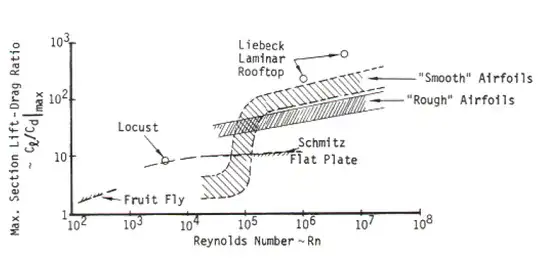
As I looked at that region around the gnat, I thought looked mostly proportional to Reynolds number. Reynolds number in this case is $ v L \rho / \mu $ where $L$ is a general proxy for the linear scale of the thing. But there's a larger problem here - that we're looking at drag coefficients for low Reynolds number. That doesn't make sense, since we're in the region of Stokes' Drag, not turbulent drag. After thinking about it, the low Reynolds number of the above graph made sense if you assume:
- Viscous forces increase the drag force
- The $1/2 \rho v^2 A$ proportionality still holds for lift
In other words, you can find the above proportionality to Reynolds number if you use the turbulent drag equation for lift and the laminar drag equation for drag. You can do this by just dividing them out, or you could create an "artificial" expression for $C_D$ using the below equation. It's artificial because it's supposed to be a shape factor, but we're out of the region of applicability for that.
$$ F_L = \frac{1}{2} \rho v^2 C_l A$$
$$ F_D = 6 \pi \mu L v $$
This makes sense to me, because there's no obvious improvement to be expected for lift from increased viscosity (note: this is almost the exact opposite claim of anna v's answer). A gnat makes a great energetic sacrifice in order to gain access to the ecological niche it inhabits. There are two other equations I want satisfied. One is that the lift is equal to the weight of the body and that the craft has enough energy to travel its full range ($x$). These follow in order of lift and energy.
$$ m g = \rho_b L^3 g = F_l$$
$$ F_d x = \nu L^3 $$
Here, $\nu$ is taken to be the energy density of the batteries or whatever the craft is using. From the equations I wrote I obtained these expressions:
$$ v = \sqrt{ L \frac{2 \rho_b g }{\rho C_L } } $$
$$ x = \frac{ \nu L^{3/2} }{12 \pi \mu} \sqrt{ \frac{2 \rho C_L }{\rho_b g} }$$
There are a few other metrics we're interested in. One is the power consumption, $v F_d$. That scales according to $L^{3/2}$. If you had some motor with a max power output that scaled as $L^3$, then scaling down would become difficult as you would need a larger motor relative to the size of the craft. This is consistent with the observation that flying insects have the greatest per-mass power consumption of most animals.
So far my answer has been awfully contrarian, since I share almost none of the conclusions of others. But let's look at one final metric, $1/2 m v^2$ compared to the total energy content. The kinetic energy relative to total energy ratio scales as $1/L^2$. That means that the needs of a runway are basically irrelevant on smaller scales. Because of that, it would definitely be easier for it to get up into the air.