MAIN QUESTION
A mass body is held in place by a friction force. The object that generates this friction accelerates upwards. Because the acceleration is not acting inline with the center of mass of the body, the body starts to rotate around its contact point. Which is a result of the moment of friction that is not big enough to keep the body in place.
The main question is how to calculate the maximum linear acceleration to prevent any angular displacement of the body? (The acceleration is applied on the object that holds the body through the friction)
Some sub-questions that would help me are:
- How to calculate the moment of friction?
- How to translate the linear acceleration to a moment or angular momentum when it accelerates from the center of the friction connection?
- Is it correct to use the center of the friction connection as the "origin" of the calculation? (Moments, inertia and angular acceleration would be calculated relative to this "origin")
Previous formulation of the question. It gives more background information and an example situation of the question to clarify the question.
Context
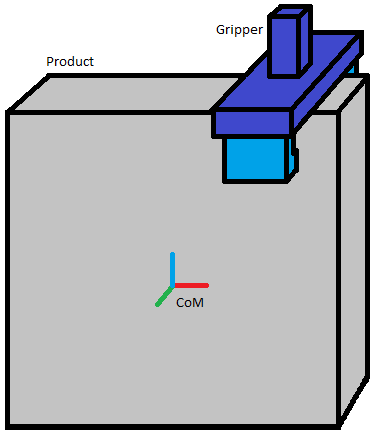
I am currently writing software that automatically calculates the maximum linear acceleration of a 6-axis robot when holding a product. The robot uses a gripper to pick and place products. The product may not displace or rotate relative to the gripper.
Problem
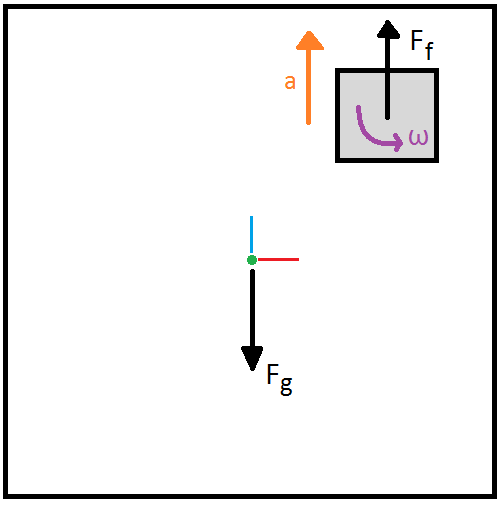
In the first place I assumed it would be as simple as: $\sum F=m*a$. But this would only suffice if the product is picked in its center of mass. When the product is not picked in its center of mass, the product starts to rotate a bit when the robot (de-)accelerates (Example situation can be seen in figure 1).
Thoughts so far...
Assumed is that the clamping force is evenly spread over the contact area between the product and gripper. The gravitational force generates a moment relative to the center of the contact area. The friction force is spread over the area which would generate a opposing moment. The acceleration of the gripper would generate an angular momentum.
These moments together with the differential of the momentum would then be implemented in: $$\sum M + \dfrac{\Delta L}{\Delta t} = I * \alpha$$ Then assume $\alpha = 0 \hspace{2mm}rad/s^2$ and calculate the maximal momentum. Which would need to be translated back to a linear acceleration ...
No idea if I am heading in the right direction. I cannot find any examples where a clamped body rotates around the center of the friction contact area due to linear motion.
Any help would be appreciated. Thanks in advance.