For the same speed and inclination, is the physics acting on the body equivalent? Lets assume the person keeps pace with something that moves perfectly uniformly.
Asked
Active
Viewed 1,709 times
2 Answers
3
I believe this is the kind of question you can answer right away using the principle of relativity:
Special principle of relativity: If a system of coordinates K is chosen so that, in relation to it, physical laws hold good in their simplest form, the same laws hold good in relation to any other system of coordinates K' moving in uniform translation relatively to K.
— Albert Einstein: The Foundation of the General Theory of Relativity, Part A, §1
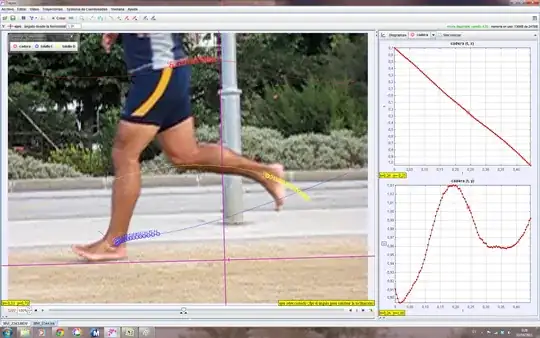
But since the quick answer is obviously not all that evident, lets do it also the long way... The running gait has several distinct phases to it. Simplifying things to the maximum, there is a stance phase, while the foot is on the ground, and a flight phase, where the runner is basically in parabolic motion. During the stance, the legs recoil to drive you up again, but the horizontal velocity remains relatively constant. The image below shows a still of a video analysis of my own running gait I did using tracker. The graphs on the right are the x-t and y-t graphs for my hip, which is pretty close to the COM. There are many subtleties that can be taken into account, but this sort of supports the claim that horizontal speed is roughly constant throughout, and there is a parabolic flight phase.
To keep running you have to keep yourself hopping up and down. Ideally most of the upward push comes from recoil from the tendons, and all force is done in the vertical direction, so that the horizontal speed does stay constant.
Lets say your constant running speed is $u$, and you are gong up an incline of angle $\varphi$, and each of your hops has you leaving the ground with vertical speed $v$. The trajectory of your center of mass will be:
$$x=tu\cos \varphi$$ $$y = tv -\frac{1}{2}gt^2$$
You will find yourself again on the ground solving the above system for $y=x\tan\varphi$, so after a time $t=2v/g-2u\sin\varphi/g$ you will find yourself a horizontal distance $x=\frac{2u\cos\varphi}{g}(v-u\sin\varphi)$ further forward, which is a distance $l=\frac{2u}{g}(v-u\sin\varphi)$ further forward along the incline.
Right before pushing off, the runner had KE per unit mass$\frac{1}{2} u^2$, after pushing off, $\frac{1}{2}(u^2\cos^2\varphi+v^2)$, so each hop costs you an energy expenditure of $\frac{1}{2}(v^2-u^2\sin^2\varphi)$.
To the hopping, you have to add the work per unit mass done to keep yourself moving upwards during stance, which is $t_s u g \sin\varphi$.
Now let the floor start moving down at that same speed $u$, as in a treadmill. Now during the stance phase your center of mass remains stationary, and the parabolic flight turns into
$$x=0$$ $$y = t(v-u\sin\varphi) -\frac{1}{2}gt^2$$
Before hopping you were at rest, so your KE per unit mass was zero, right after take off you are moving at a speed $v-u\sin\varphi$, so not surprisingly, the energy cost of your hops is again $\frac{1}{2}(v^2-u^2\sin^2\varphi)$.
What about stance? It is tempting to say that, since your center of mass isn't moving, there is no energy expenditure, and that therefore running on a treadmill is only equivalent to real world running if ground contact time is zero, which is never the case. This is of course not true. Because you are standing still in a gravity field, there has to be a force $g$ per unit mass pushing you upwards. This force is happening at the contact point of the foot and the treadmill, and the treadmill is moving down with a speed $u\sin\varphi$, so mechanical work is being done at the rate $ug\sin\varphi$ per unit mass. This is, again not surprisingly, the same as before.
Jaime
- 3,958
1
No it isn't. Walking on ground raises or lowers your center of gravity (over hills and valleys) and that requires work $W=m g h$. On a treadmill the only energy you expend is due to the inefficiency of your stride.
Update 1
Here is the engineering proof that when the treadmill angle equals the hill angle the problem is NOT the same:
Torque on motor (based on linear controller set at constant speed $\omega_0 = v_0/r$)
$$T(\omega)=d\left(1-\frac{\omega}{\omega_{0}}\right)$$
Equations of motion for motor based on projected load along the treadmill direction $W\sin\theta$.
$$T=I\dot{\omega}-r (W\sin\theta)$$
Solution based on $t = \int \frac{1}{\dot \omega}\,{\rm d} \omega $
$$\omega(t)=\omega_{0}\left[1+\frac{rW\sin\theta}{d}\left(1-e^{-\frac{d}{I\omega_{0}}t}\right)\right]$$
The distance traveled is not needed but included here for fun.
$$s(t)=\omega_{0}t+\omega_{0}\frac{rW\sin\theta}{d}\left[t+\frac{I\omega_{0}}{d}\left(e^{-\frac{d}{I\omega_{0}}t}-1\right)\right]$$
The work done is based on force times speed integral over time
$$E=\int_{0}^{t_{f}} ( W\sin\theta) \, (r \omega(t)) \,{\rm d}t$$
and it should be equal to the work done by the walker on a hill moving with speed $v_0=\omega_0 r$
$$E=W\sin\theta v_{0}t_{f}$$.
This can only be accomplished when $$e^{\Phi}\left(\Phi-1\right)+1=0$$ with $\Phi=\frac{d\, t_{f}}{I\omega_{0}}r^{2}$.
The above is only zero when $\Phi=0$, which means the treadmill is never equivalent to a walker up a hill.
Symbol description
$W$ Weight of walker
$\theta$ Angle of hill, or treadmill
$r$ Sprocket radius of treadmill motor
$\omega$, $\omega_{0}$ Rotational speed of motor and control speed of motor
$I$ Rotational inertia of motor and treadmill assembly
$d$ Motor control gain, or speed-torque coefficient
$s$ Distance traveled along the treadmill
$t$, $t_{f}$ Time during the step and time to complete step
John Alexiou
- 40,139