The no slipping conditions adds 3 constraints to the 5 degrees of freedom of the problem. The velocity of the contact point should be zero (as you stated).
$$ \mathbf{v}_C = \mathbf{v}_G + \mathbf{r}_{G/C} \times \boldsymbol{\omega} = 0$$
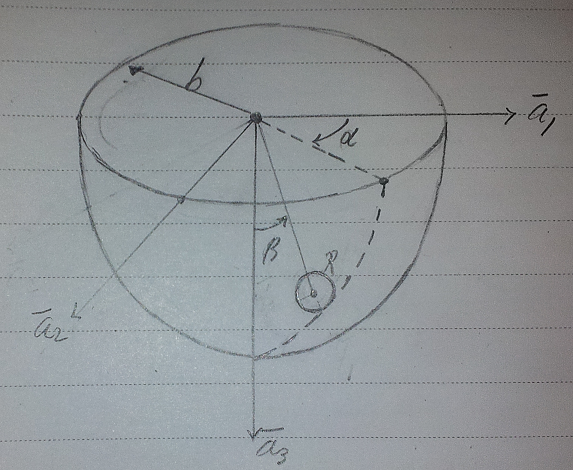
The position vector $\mathbf{r}_G$ is a function of the angles $\alpha$ and $\beta$ only
$$ \mathbf{r}_G = (b-R) \begin{pmatrix} \cos(\alpha) \sin(\beta) \\ \sin(\alpha) \sin(\beta) \\ -\cos(\beta) \end{pmatrix} $$
By differentiation you get at the linear jacobian $\mathtt{J}_A$ relating the generalized velocities $\dot{q}_A = (\dot{\alpha}, \dot{\beta})$ to the cartesian velocity of the center $\mathbf{v}_G = \mathtt{J}_A \dot{q}_A$
$$\mathbf{v}_G = (b-R) \begin{vmatrix} -\sin\alpha \sin\beta & \cos\alpha \cos\beta \\
\cos\alpha \sin\beta & \sin\alpha \cos\beta \\
0 & \sin\beta \end{vmatrix} \begin{pmatrix} \dot{\alpha} \\ \dot{\beta} \end{pmatrix} $$
The orientation matrix $\mathtt{E}$ of the ball depends on three Euler angles $\varphi$, $\psi$ and $\theta$ representing rotations about local axes $\mathbf{x}_1$, $\mathbf{x}_2$ and $\mathbf{x}_3$ respectively.
$$ \mathtt{E} = \mathrm{Rot}(\mathbf{x}_1,\, \varphi)\,\mathrm{Rot}(\mathbf{x}_2,\, \psi)\,\mathrm{Rot}(\mathbf{x}_3,\, \theta) $$
Again by differentiation using the chain rule you arrive at the rotational jacobian $\mathtt{J}_B$ relating the generalized rotational velocities $\dot{q}_B = (\dot{\varphi},\dot{\psi},\dot{\theta})$ to the ball rotational velocity $\boldsymbol{\omega} = \mathtt{J}_B \dot{q}_B$
$$ \boldsymbol{\omega} = \mathbf{x}_1 \dot{\varphi} + \mathrm{Rot}(\mathbf{x}_1,\, \varphi)\,\left(\mathbf{x}_2 \dot{\psi} + \mathrm{Rot}(\mathbf{x}_2,\, \psi)\, \mathbf{x}_3 \dot{\theta}\right) $$
$$\boldsymbol{\omega} = \begin{vmatrix} \mathbf{x}_1 & \mathrm{Rot}(\mathbf{x}_1,\, \varphi)\,\mathbf{x}_2 & \mathrm{Rot}(\mathbf{x}_1,\, \varphi)\,\mathrm{Rot}(\mathbf{x}_2,\, \psi)\,\mathbf{x}_3 \end{vmatrix} \begin{pmatrix} \dot{\varphi} \\ \dot{\psi} \\ \dot{\theta} \end{pmatrix} $$
The above jacobian $J_B$ is a 3×3 matrix with the first column $\mathbf{x}_1$, the second column $\mathrm{Rot}(\mathbf{x}_1,\, \varphi)\,\mathbf{x}_2$ etc.
Also note that $\mathbf{r}_{G/C} \times \boldsymbol{\omega}$ can be written in matrix form as
$$ \begin{vmatrix}
0 & -z_{G/C} & y_{G/C} \\
z_{G/C} & 0 &-x_{G/C} \\
-y_{G/C} & x_{G/C} & 0
\end{vmatrix}
\begin{pmatrix} \omega_x \\ \omega_y \\ \omega_z \end{pmatrix} $$
NOTE: Related answer proving the relationship between Euler angles and rotational velocity