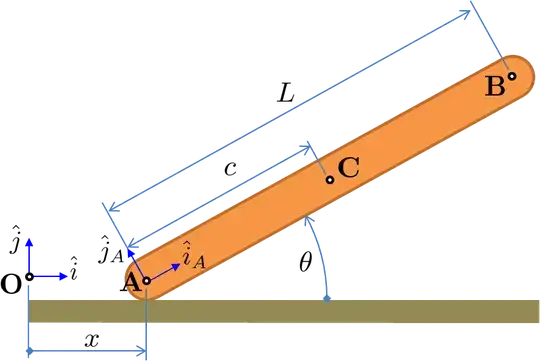
Consider a uniform rod of length $L$ pivoting and sliding on a horizontal plane.
Kinematics
You want to describe the relationship between the coordinates (and their derivatives) $x$ and $\theta$ and the motion of points A, B, and C.
Position Kinematics
$$ \begin{matrix}
\vec{r}_A = x\,\hat{i} & \hat{i} = (1,0,0)\\
\vec{r}_B = \vec{r}_A + L\,\hat{i}_A & \hat{i}_A = (\cos\theta,\sin\theta,0)\\
\vec{r}_C = \vec{r}_A + c\,\hat{i}_A & \hat{j}_A = (\mbox{-}\sin\theta,\cos\theta,0)
\end{matrix} $$
Velocity Kinematics
$$ \begin{matrix}
\vec{v}_A = \dot{x} \hat{i} & \vec{\omega}_A = \dot{\theta} \hat{k} \\
\end{matrix} $$
$$ \vec{v}_B = \vec{v}_A + \vec{\omega}_A \times (\vec{r}_B-\vec{r}_A) $$
$$ \vec{v}_C = \vec{v}_A + \vec{\omega}_A \times (\vec{r}_C-\vec{r}_A) $$
Acceleration Kinematics
$$ \begin{matrix}
\vec{a}_A = \ddot{x} \hat{i} & \vec{\alpha}_A = \ddot{\theta} \hat{k} \\
\end{matrix} $$
$$ \vec{a}_B = \vec{a}_A + \vec{\alpha}_A \times (\vec{r}_B-\vec{r}_A) + \vec{\omega}_A \times (\vec{v}_B-\vec{v}_A) $$
$$ \vec{a}_C = \vec{a}_A + \vec{\alpha}_A \times (\vec{r}_C-\vec{r}_A) + \vec{\omega}_A \times (\vec{v}_C-\vec{v}_A) $$
Kinetics
You want to relate the motion of the center of gravity to the forces acting on the system. Use the Newton-Euler equations of motion for the rod on the center of gravity.
$$\begin{matrix}
\vec{F}_A - m g \, \hat{j} = m \,\vec{a}_C \\
(\vec{r}_A-\vec{r}_C)\times \vec{F}_A = I_C \, \vec{\alpha}_A
\end{matrix} $$
and the definition of reaction force producing no work
$$ \vec{v}_A \cdot \vec{F}_A = 0 $$
is enough to solve for $\vec{F}_A$, $\ddot{x}$ and $\ddot{\theta}$.