I think what you are asking about is answered by the fundamental theorem in the mechanics of rigid bodies, which states that the motion of any rigid body can be decomposed into the motion of its center of mass (not necessarily rectilinear) and a rotation about its center of mass (COM). The two statements you emphasize are direct corollaries. Please see details in the suggested link or any text on the subject.
However, the idea is not that there is some intrinsic center of rotation that sometimes happens to coincide with the center of mass, or that we necessarily decompose the forces acting on the body into some component translating the COM and another generating the torque about the COM. It is just that the equations of motion acquire the simplest form when expressed this way.
So, to answer your questions directly:
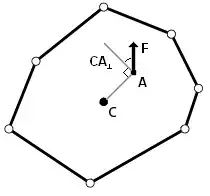
How do I find the center of rotation for a polygon when the center of mass is (C), the force is (F), and the point where the force is applied is (A)?
Take the center of rotation as (C), regardless of where the force is applied.
Also, how much of the force translates to translational force and how much of it translates to rotational force?
All of it, in both cases. The equations of motion for the COM of your planar polygon are just
$$
M \vec{a} = \vec{F}\\
I\alpha \vec{k} = \vec{T}
$$
where $M$ is the total polygon mass, $\vec{a}$ is the linear acceleration of the COM (and of the rigid body), I is the moment of inertia relative to the COM, $\alpha$ is the angular acceleration about the COM, $\vec{k}$ is the unit vector normal to the polygon plane, and $\vec{T}$ is the torque of $\vec{F}$ about the COM. In 3D the torque equation would contain an additional term on the left hand side.
How do the forces add up when there's more than one?
Vector-wise as always. The total force is the vector sum of individual forces, and for 2D the total torque is the sum of individual torques about the COM or the torque of the total force about the COM, whichever you prefer.