This is my first question here on stackexchange. I hope that I can be understood. If not, tell me and I will reformulate and fill in with details.
I have simulated a single pendulum and a double pendulum in matlab to find the Lyapunov exponent. The single pendulum is a two dimensional system (angle $q$ and canonical momentum $p$) so there should be no chaos and no positive Lyapunov exponent. However, the Lyapunov exponent that I found was similar in magnitude compared to the double pendulum that I also simulated. The results are plotted in the figures below:
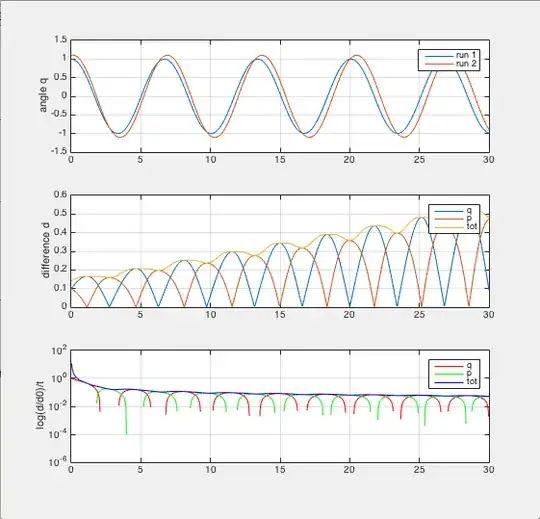
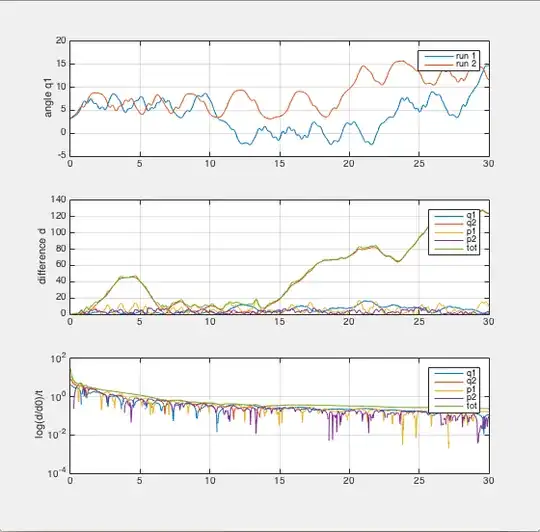
The first plot shows the time evolutions of the angle $q(t)$ for the pendulum arm. Both he simulations were run two times. The second run had initial conditions with all the coordinates displaced with the amount $d_0=0.1$.
The second plot shows the absolute value of the difference between the two trajectories as it evolves in time.
The third plot is the Lyapunov exponent which I derived from assuming that the separation between trajectories grows exponentially
\begin{equation} d(t)=|q(t)-q_e(t)|=d_0e^{\lambda t} \Rightarrow \lambda\left(t\right)=\frac{1}{t}\ln{\frac{d\left(t\right)}{d_{0}}} \end{equation} Where the subscript $e$ denotes the trajectory with the error in the initial condition.
The total separation between trajectories the double pendulum simulation is found with: \begin{equation} d_{tot}=\sqrt{(q_1-q_{1e})^2+(q_2-q_{2e})^2+(p_1-p_{1e})^2+(p_2-p_{2e})^2} \end{equation}
So why is the Lyapunov exponent for the two systems so similar? I thought the single pendulum would produce negative exponents and the double pendulum would produce an exponent in the magnitude of 10 to 20.