I am no mathematician and am a little afraid that my answer is too simple to be true, but here goes:
I use Fourier transforms to define the fractional derivative. $x(\omega)$ is defined such that
$$ x(t) = \int_{-\infty}^\infty \, \frac{\text{d}\omega}{2\pi} \text{e}^{i \omega t} \, x(\omega) \, .$$
Then any integer derivatives is
$$ \frac{\text{d}^n}{\text{d} t^n} x(t) = \int_{-\infty}^\infty \, \frac{\text{d}\omega}{2\pi} \text{e}^{i \omega t} \, (i \omega )^n \, x(\omega) \, ,$$
so that
$$ \left(\frac{\text{d}^n x}{\text{d} t^n}\right)(\omega) = (i \omega )^n \, x(\omega) \, .$$
Then this can be generalised to any real number $n$. In particular,
$$ \frac{\text{d}^{1/2}}{\text{d} t^{1/2}} x(t) = \int_{-\infty}^\infty \, \frac{\text{d}\omega}{2\pi} \text{e}^{i \omega t} \, \sqrt{i \omega } \, x(\omega) \, .$$
Since your equation is linear it can be solved separately for each Fourier modes. In Fourier space it becomes
$$ \left(- m \omega^2 + k \sqrt{i \omega}\right) x(\omega) = 0 \, .$$
This tells us that either $x(\omega) = 0$ or $ \omega^2 = \frac{k}{m} \sqrt{i \omega}$. The first solution is trivial. It is equivalent to $x(t)= 0$. The second however has four solutions:
\begin{align}
& \omega_1 = \left(\frac{k}{m}\right)^{2/3} \text{e}^{i\,\pi/6} \, ,\\
& \omega_2 = \left(\frac{k}{m}\right)^{2/3} \text{e}^{i\,\pi/2} \, , \\
& \omega_3 = \left(\frac{k}{m}\right)^{2/3} \text{e}^{i \, 5\pi/6} \, , \\
& \omega_4 = 0 \, .
\end{align}
Then the most general solution to your problem is
$$x(t) = C_1 \text{e}^{i\omega_1 t} + C_2 \text{e}^{i\omega_2 t} + C_3 \text{e}^{i\omega_3 t} + C_4\, .$$
$C_i$ are integration constants. Explicitly one finds,
$$x(t) = C_1 \, \text{e}^{i \,t \, (k/m)^{2/3} \sqrt{3}/2} \, \text{e}^{-(k/m)^{2/3} t/2} + C_2 \, \text{e}^{- (k/m)^{2/3} t} + C_3 \, \text{e}^{-i \, t \, (k/m)^{2/3} \sqrt{3}/2} \, \text{e}^{-(k/m)^{2/3} t/2} + C_4 \, .$$
We find three solutions that decay exponentially and one constant. Two of the decaying solutions oscillate as well.
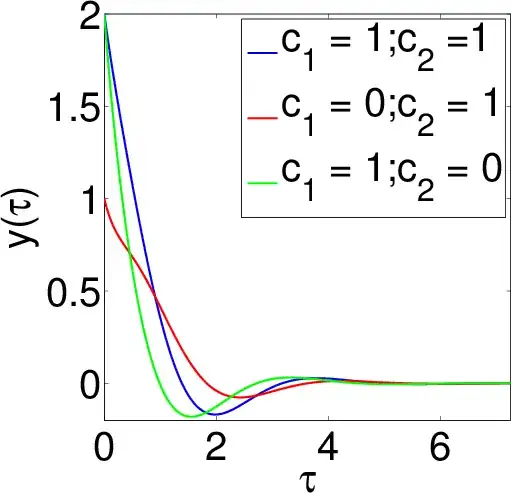
In order to make a plot, I set C_4 = 0 because this amounts to a simple vertical shift of $x(t)$, I choose $C_1 = C_2^* = (c_1 + i c_2)/2$ and $C_3 = C_3^*$ so that $x(t)$ is real, I rescale the time according to $\tau = t \, (k/m)^{2/3}/2$ and rescale $x(t)$ according to $y = x \, C_3$. Then my solution becomes,
$$y(\tau) = \text{e}^{-\tau} \left[ c_1 \, \cos(\sqrt{3} \, \tau) + c_2 \sin(\sqrt{3} \, \tau) \right] + \text{e}^{-2 \tau} \, .$$
Here is a plot of $y(\tau)$ for different values of $c_{1,2}$: