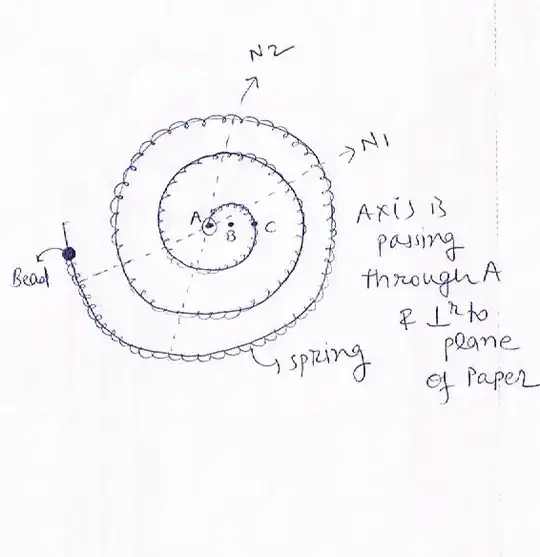
I think I initially misunderstood the question. I now believe there are three components here: a rigid massless rod in the shape of a spiral; a massless spring that is wound around the rod in a frictionless manner; and a bead at the end of the spring. The entire system is anchored at the point A by a single nail - thus, the system is free to rotate about this point A (it is a hinge, i.e. it fixes the position of the spiral at A, but not the direction).
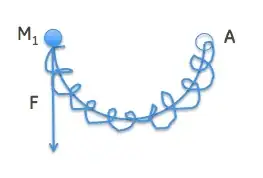
Now it would be instructive to look at the forces on the system - remembering Newton's third law. You drew the following (I am simplifying the spiral to make the drawing clearer but the principle is the same):
In reality, what you have is the following - at every point in the system there must be a force balance by Newton's third law:
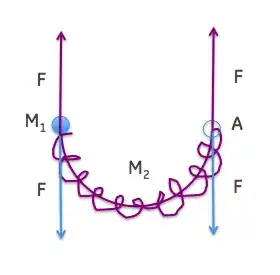
The spring is pulling "down" on the mass $M_1$ and on the nail $A$; the reaction is a net force of $2F$ on the "spring plus rod" system, to which I am assigning a mass $M_2$.
Now what would happen in a system with finite $M_2$ is the following:
Mass $M_1$ accelerates downward with $$a_1 =\frac{F}{M_1}$$
Mass $M_2$ accelerates upward with $$a_2 =\frac{2F}{M_2}$$
A short time later, the situation will look like this (I am sorry this is a messy drawing):
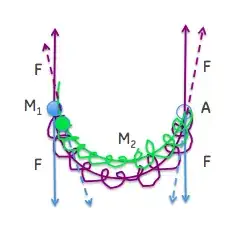
As you can see, the mass $M_1$ is moving down, and the mass $M_2$ is moving up; the direction of the forces is changing.
Now the relative velocities of the two parts of the system: bead, and {spring + rod} after a short time $\delta t$ (before the system has had chance to change shape significantly) is given by their relative masses from the two accelerations above:
$$ \frac{V_1}{V_2} = \frac{M_2}{2M_1}$$
(and these velocities are in opposite directions). Note that this expression shows conservation of angular momentum, since
$$ 2 M_1 V_1 = M_2 V_2$$
and the distance from the center of rotation (chosen to be at A) for $M_1$ is twice the distance for $M_2$ (projected onto the horizontal axis).
Now the only thing you have to do is take the limit of the above where $M_2$ is zero, and you see that angular momentum is conserved for this system.
Afterthought
The way I drew the spiral, it looked like a semicircle. In reality, one property of a spiral is that there has to be a radial component to the slope - so the force on mass $M_1$ is really not just tangential (as I drew it in the initial drawing), but it has both a tangential and a radial (inward) component. This shows that there is a force available for accelerating the mass inwards from the moment the system is released. The other aspects of the above description are unchanged - although it's slightly trickier to convince yourself of the balance of forces on the light rod when it has arbitrary shape. But the same argument holds as before: when the mass of rod+spring tends to zero, it will move instantaneously in a direction that opposes tangential motion by $M_1$, thus conserving angular momentum.
one more thought
I just re-read where you state "since the only thing moving is the bead". This could be read as meaning that the rod is fixed - in other words, that the point A is fixed such that the rod doesn't rotate about A. In that case there will be a torque at A which imparts angular momentum to the rod-spring-bead system on the one hand, and an equal and opposite angular momentum on the rest of the universe - in other words, with this kind of coupling you cannot consider the system "isolated".