Terms like OpenServo should be explained in questions and links should be provided to relevant websites.
Some details and links to OpenServo resources are provided below.
There are two obvious ways of achieving simultaneous starting of multiple servos. There will be other ways.
- As OpenServo is open source and processor based it would be "easy" to add non standard features. One such method which should be achievable with a minimum of modification of the system would be to allow all servos to listen for a common I^2C address and implement "All stop" and "All start" signals which can be decoded by all connected servos. Commands for an individual servo received during "all stop" are quesd and implemented immediately after an "all start: is received. So -
- Send All Stop signal.
- Send codes to each connected servos.
Send Y'All start now
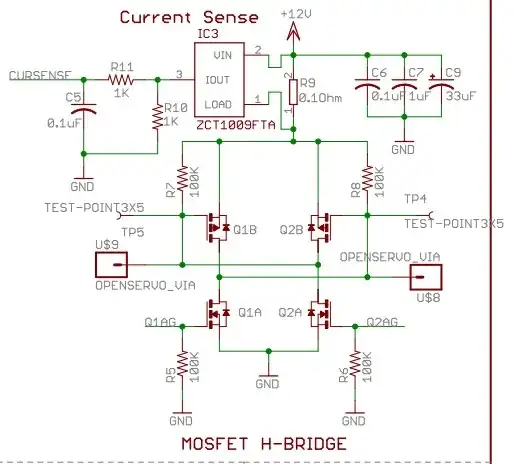
- Hardware control.
The SparkFun Openservo circuit diagram eferenced below uses the H bridge driver shon below. If the +12V feed at top centre is interupted the servo will not drive. If this feed point is common to a group of servos, all may be turned on and off with ease with a single "switch" (probably a high side P Channel MOSFET.
OpenServo is an open community-based project with the goal of creating a high quality digital servo for robotics. They say
Some of the many features of the OpenServo include:
-High performance AVR 8-bit microcontroller
-Compact H-Bridge with high performance MOSFETs
-Precision control over servo position and speed
-I2C/TWI based interface for control and feedback
-Feedback of position, speed, voltage and power
-Advanced curve based motion profile support
-EEPROM storage of servo configuration information
-Software written in C using free development tools
-I2C/TWI bootloader and GUI programmer
Documentation page
SparkFun index page
Circuit of sparkFun implementation.