Linear algebra (Osnabrück 2024-2025)/Part II/Lecture 52
On , there are several norms; however, many important concepts like the convergence of a sequence, the compactness of a subset, the continuity of a mapping, do not depend on the norm nut only on the topology. This means that we can often choose a norm that is particularly adapted for a certain problem. In this lecture we discuss the topological basics for this approach; we will usually skip the proofs, which can be found in an appendix. In the next two lectures we will apply these methods to understand the convergence of powers of matrices.

- Subsets in a metric space
Let be a metric space, , and a positive real number. Then




is called the open ball, and

is called the closed ball
around of radius .

Balls do not necessarily look like a ball, they do however in the Euclidean norm. For , is just the open interval , and is just the closed interval .


![{\displaystyle {}]x-\epsilon ,x+\epsilon [}](../../0269b67b80fb8647d90bf354cc7e5c61e6aba2b5.svg)

![{\displaystyle {}[x-\epsilon ,x+\epsilon ]}](../../785965eadd2e46e6e4347889a9929658e0d9845a.svg)
Let be a metric space. A subset is called open (in ), if for every there exists an such that




Let be a metric space. A subset is called closed if the complement is
open.

Caution! Closed is not the "opposite“ of open. "Most“ subsets of a metric space are neither open nor closed; there are also some subsets that are both open and closed, e.g., the empty subset and the total space. Open balls are indeed open, and closed balls are indeed closed, see Exercise 52.1 and Exercise 52.2 .
Let be a
metric space. Then the following properties hold.- The empty set and the total space are open.
- Let be an arbitrary index set, and let
, ,
denote open sets. Then also the
union
is open.
- Let be a finite index set, and let
, ,
be open sets. Then also the
intersection
is open.







Proof

Therefore, the open sets in a metric space form a topology in the sense of the following definition.
A topological space consists of a set together with a subset of the power set of that satisfies the following structural conditions (the subsets belonging to are called open).




- The empty set and the set are open.
- The intersection of finitely many open sets is again open; that is, if , then also .
- The union of arbitrary many open sets is again open; that is, if for every (of an arbitrary index set ), then also .




- Equivalent norms
Let be a -vector space. Two norms and are called equivalent, if they define the same topology, that is, the same
open sets.



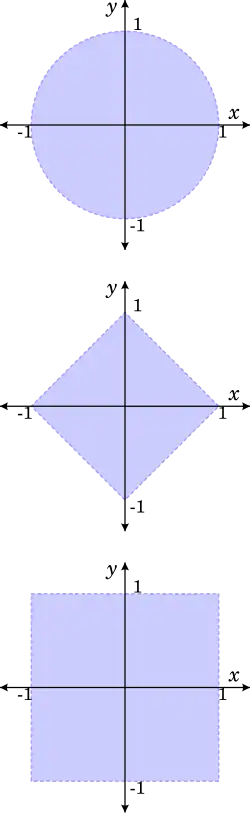
On , the Euclidean norm, the sum norm, and the maximum norm are equivalent. To see this, let be a vector, and assume without loss of generality that has the largest modulus among the components. Then we have the the estimates



and this yields essentially the equivalence between the Euclidean norm and the maximum norm.
We will see in Theorem 52.16 that on a finite-dimensional -vector space, and two norms are equivalent. In order to see this, we need some preparations, in particular, the concept of compactness.
- Compactness
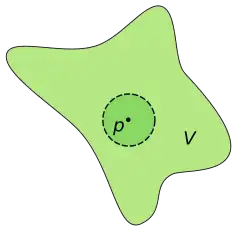
A subset in a metric space is called bounded if there exists a real number satisfying




The boundedness and also compactness depend on the chosen metric. It is important to also have a notion of compactness that is purely topological.
A topological space is called compact if for every open covering

there exists a finite subset such that


The following theorem is called Theorem of Heine-Borel.



- Continuous mappings between metric spaces
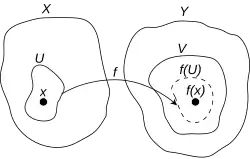
A metric space is given by a distance function; this implies that two points might be "closer“ to each other than two other points. For a mapping

between two metric spaces, one can ask to what extent it is possible to control the distance in the target space by the distance in the source space . Let , and let denote the image point. One would like that for a point , that is "close“ to , also the image point is close to . In order to make this intuitive idea more precise, let be given. This represents a "accuracy wished for“. The question is whether there exists a (a "starting accuracy“) such that for all fulfilling , the relation holds. This leads to the concept of a continuous mapping.










Let and be metric spaces,


a mapping, and . The mapping is called continuous in if for every there exists a such that


holds. The mapping is called continuous if it is continuous in for every
.Instead of working with closed ball neighborhoods, we could work with open ball neighborhoods. The easiest examples of continuous mappings are a constant mapping, the identity of a metric space, and the inclusion of a subset of a metric space, endowed with the induced metric. See the exercises.
Let

denote a mapping between the metric spaces
and . Then the following statements are equivalent.- is continuous in every point .
- For every point and every , there exists a such that implies that holds.
- For every point and every convergent sequence in with , also the image sequence converges to the limit .
- For every open set , also the preimage is open.






The property (4) shows that continuity is purely a topological property.
- Linear continuous mappings
A linear mapping is in general not continuous. However, there is a quite simple characterization for continuity of a linear mapping, it is enough to check continuity in the origin. We will see in Theorem 52.17 that this property does always hold for finite-dimensional vector spaces.
Let and be normed -vector spaces, and let


denote a
linear mapping. Then the following properties are equivalent.- is continuous.
- is continuous in the origin.
- The set
is bounded.


From (1) to (2) is clear. From (2) to (3). In particular, there exists for a such that


implies the estimate

Therefore,

implies then, due to the compatibility with scalars,

From (3) to (1). Let be an upper bound for the norm on the image set of the -sphere. Let be given. We have




Hence, for , we can choose

- Equivalence of norms
Let be a -vector space, and let and be norms
on . Then the following statements are equivalent.- The two norms are equivalent.
- The identity
is continuous when is endowed with the first norm on the left, and the second norm on the right, and vice versa.
- The -ball is bounded with respect to the -norm, and vice versa.
- There exist real numbers such that
and
holds for all .




The equivalence between (1) and (2) follows from Theorem 52.13 , the equivalence between (2) and (3) follows from Theorem 52.14 . The properties (3) and (4) are equivalent due to the compatibility of the norms with scalars.
On a finite-dimensional -vector space , any two norms are
equivalent.We use Lemma 52.15 . The norm and the topology depend only on the underlying real vector space; therefore, we may assume

For a basis , there exists an isomorphism


with . Under an isomorphism , by setting


we get a norm on . Hence, we may directly consider the case . We compare now an arbitrary norm on with the maximum norm and with the Euclidean norm; we know by Example 52.7 that these two norms are equivalent to each other. Let . Because of



sufficiently small -open balls are contained in -open balls. Therefore, the topology of the maximum norm is as fine as the topology of any other norm. To prove the converse, we consider the identity



where the topology on the left-hand side is given by the Euclidean norm (or maximum norm), and on the right-hand side by the norm. The reasoning so far shows that this mapping is continuous. The Euclidean -sphere on the left is compact due to the theorem of Heine-Borel

and, according to Fact *****, is also compact with respect to the norm . We denote this set by . Since is a Hausdorff-space with every norm, it follows by Exercise 52.5 that is closed. Since the origin does not belong to , there exists a


such that

(the open ball with respect to ). For we obtain, because of , the estimate




Therefore,

Let and be normed -vector spaces, and let
denote a linear mapping. Let be finite-dimensional. Then is
continuous.The image under the mapping is also a finite-dimensional vector space; therefore, we may assume that both spaces are finite-dimensional. We also may assume that and . Because of Theorem 52.16 , we may assume that we have the maximum norm on both sides. Let be the maximum of the absolute values of the entries in the describing matrix of , with respect to the standard bases. For with





we obtain

Therefore, continuity follows from Theorem 52.14 .
| << | Linear algebra (Osnabrück 2024-2025)/Part II | >> PDF-version of this lecture Exercise sheet for this lecture (PDF) |
|---|